DALGA HAREKETİ İLE SALINIM YAPARAK ENERJİ ÜRETEBİLEN YÜZEN GÖVDE YAPILANMASI
Teknik Alan
Sistem, deniz ve benzeri su kütleleri üzerinde oluşan dalga ve benzeri su hareketleri ile kontrol edilebilen sınırlı salınım gösterebilen ve bu hareketin enerji dönüşümü için kullanılabildiği bir yüzen gövde yapılanmasına ilişkindir.
Şekillerin Açıklanması
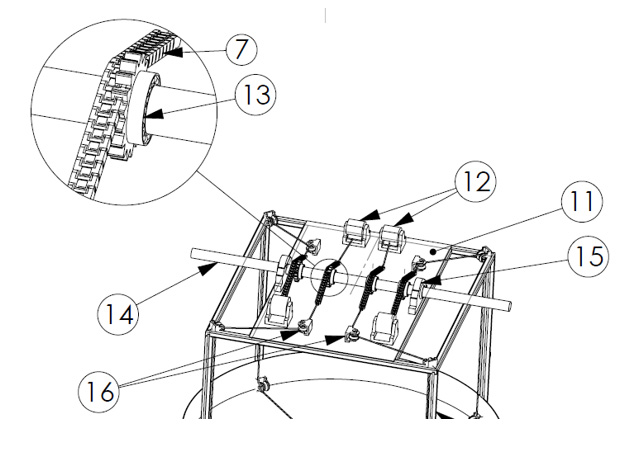
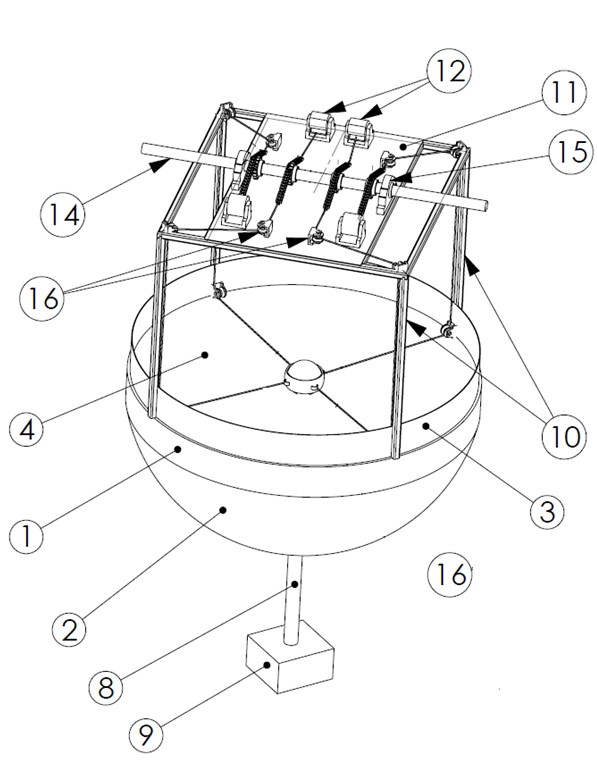
Şekil 1. Yüzen gövdenin işlevsel unsurları monte halde yandan görünümüŞekil 2. Yüzen gövdenin kesit görünümü
Şekil 3. Yüzen gövdenin kesit görünümü
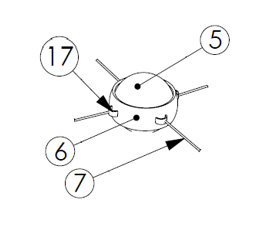
Şekil 4. Ağırlığın, ağırlık dış unsuru ve ağırlık bağlantı unsuru bağlı halde görünümü
Şekil 5. Yüzen gövdenin kesit görünümü
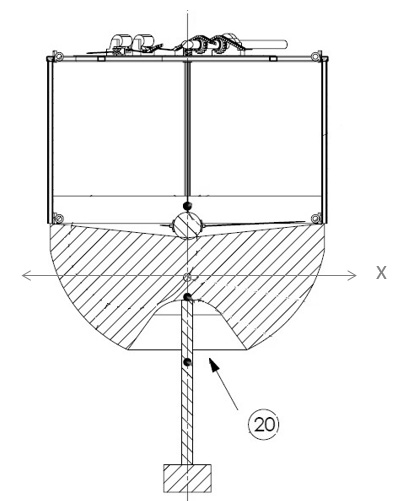
Şekil 6. Yüzen gövdenin, yüzen gövde sabitleme unsurunu bulunduracak şekilde kesit görünümü
Şekil 7. Platform yüzeyinin görünümü
Şekillerdeki Referansların Açıklaması
- Yüzen gövde
- Yüzen gövde alt bölümü
- Ağırlık hareket yüzeyi yan bariyerleri
- Ağırlık hareket yüzeyi
- Ağırlık
- Ağırlık dış unsuru
- Ağırlık bağlantı unsuru
- Bağlantı mili
- Denge ağırlığı
- Taşıyıcı ayak
- Platform yüzeyi
- Tansiyon birimi
- Kavrama ünitesi
- Hareket mili
- Hareket mili yatağı
- Yönlendirme makarası
- Ağırlık bağlantı elemanı
- Yüzen gövde sabitleme unsuru bağlantısı
- Yüzen gövde sabitleme unsuru
- Boşluk
a. Hareket yüzeyi meyil açısı
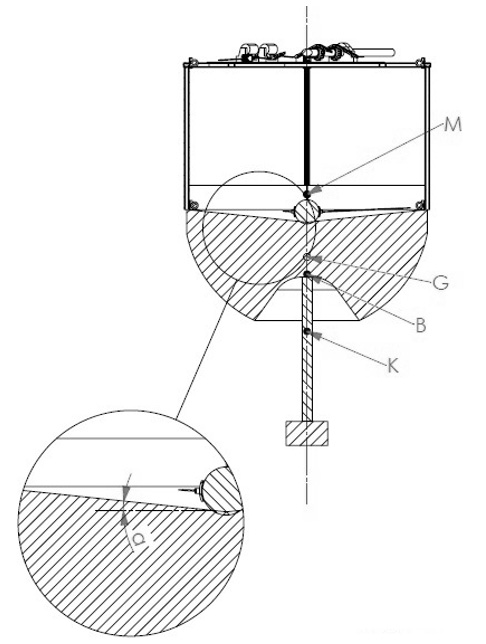
M. Metasantr noktası
K. Yüzen cisim alt orta noktası
B. Yüzdürme merkezi
G. Ağırlık merkezi
X. Yatay eksen
SİSTEMİN AÇIKLANMASI
Buluş, yapısında, yatay düzlem üzerinde 360˚ her bir yöne yani yatay eksende (X) 360 ° hareket edebilen bir ağırlık (5) bulunduran, dalga hareketi ile salınım yaparak enerji üretebilen su üstünde yüzmeye uygun yapıda bir yüzen gövdeye (1) ilişkindir.
Bahsi geçen yüzen gövde (1) su üzerinde yüzmeye uygun yapıda malzemelerden mamuldür. Yüzen gövde (1), yapısında bir yüzen gövde alt yüzeyi (2) bulundurur. Yüzen gövde alt yüzeyi (2) yapının su ile temas eden alt bölümünü oluşturmaktadır.
Yüzen gövde alt yüzeyi (2), ağırlığın (5) hareket edeceği ağırlık hareket yüzeyi (4) ve ağırlık hareket yüzeyi yan bariyerleri (3) ile donatılmıştır. Bu sayede ağırlık (5), ağırlık hareket yüzeyi yan bariyerleri (3) ile sınırlandırılmış şekilde ağırlık hareket yüzeyinde (4) hareket edebilmektedir.
Şekil 4’e göre ağırlık (5) küre formundadır ve bir ağırlık dış unsuru (6) ile donatılmıştır. Ağırlık dış unsuru (6), hem ağırlığın (5) serbest dönme hareketine hem de içinde tutulabilmesine izin verecek şekilde bir dış bilezik formunda tasarlanmıştır. Bu yapı sayesinde ağırlık (5), ağırlık dış unsuru (6) içinde serbest dönebilirken, düşmeden bilezik yapısı tarafından tutulabilmektedir.
Ağırlığın (5), yüzen gövde (1) içinde bağımsız hareket edebilmesi için, ağırlık (5), ağırlık bağlantı unsuru / unsurları (7) ile donatılmıştır. Ağırlık bağlantı unsurları (7) ip ya da zincir formunda olabilmektedir.
Şekil 4’e göre, ağırlık bağlantı unsurları (7), ağırlık dış unsuru (6) ile ilişkilendirilmiştir. Ağırlık dış unsuru (6), yüzeyinde ağırlık bağlantı elemanlarını (17) bulundurmaktadır. Ağırlık bağlantı unsurları (7), ağırlık bağlantı elemanlarına (17) bağlanabilmektedir.
Şekil 1’e göre ağırlık hareket yüzeyi yan bariyerleri (3), yüzeylerinde, yönlendirme makaraları (16) bulundurmaktadır. Ağırlık dış unsuruna (6) bağlanan, ağırlık bağlantı unsurları (7), yönlendirme makaraları (16) ile ağırlık hareket yüzeyindeki (4) ağırlığın (5) bütün hareketleri üst bölümüne aktarılabilmektedir.
Şekil 1’e göre yüzen gövde alt yüzeyi (2) farklı ya da özdeş yapıda yay kesit formundaki parçaların birleşiminden oluşmuş bir dış yüzey formudur. Bu yapı buluşa dair bir uygulamaya göre bir küre parçası formundadır.
Bu geometrik yapı sayesinde yüzen gövde alt yüzeyi (2) batırıldığı su hacmine her yönden gelen dalgalar aynı ölçüde ve miktarda etkiyebilmektedir.
Şekil 1’e göre ağırlık hareket yüzeyi yan bariyerleri (3) üzerine, taşıyıcı ayaklar (10) üzerinde platform yüzeyi (11) konumludur. Platform yüzeyi (11) ağırlık (5) hareketi tarafından oluşturulan hareket enerjisinin dönüştürülmesi için gerekli elemanları yapısında barındırmaktadır.
Ağırlığa (5) bağlı olan ve ağırlık hareket yüzeyi yan bariyerleri (3) üzerindeki yönlendirme makaraları (16) ile ağırlık hareket yüzeyin (4) üst bölümüne aktarılan ağırlık bağlantı unsurları (7), platform yüzeyi (11) dahilinde bulunan yönlendirme makaralarına (16) aktarılmaktadır. Bu yönlendirme makaraları (16) ile aktarılan ağırlık bağlantı unsurları (7) , hareket miline (14) yönlendirilir. Hareket mili (14) ise ağırlık bağlantı unsurlarından (7) alınan hareketi, hareket miline (14) dairesel hareket olarak aktarabilecek iletim unsurları ile donatılmıştır.
Hareket mili (14) üzerinde oluşturulan dairesel hareket farklı enerji dönüşüm mekanizmaları ile akuple edilerek elektrik enerjisine çevrilerek aktarılmaya uygun hale getirilebilmektedir.
Yönlendirme makaralarından (16), hareket miline (14) aktarılan ağırlık bağlantı unsurları (7), diğer bir uç kısımlarından tansiyon birimine (12) sabitlenmiştir. Tansiyon birimi (12) gerektiği zaman ağırlık bağlantı unsurunu(7) serbest bırakabilen gerektiğinde gergin tutabilen bir aparattır.
Buluşa dair bir uygulamaya göre bağlantı unsurları zincir formunda ya da iletim unsurları ile temas ettiği bölümde zincir formundadır. Bu durumda zincirden hareketin alınabilmesi için iletim unsurları dişli formundadır.
Şekil 7’ye iletim unsurları bir dişli formunda olan kavrama ünitesi (13) ile tanımlanmıştır.
Hareket milinin (14) yukarıda anlatılan hareketi sağlayabilmesi için, hareket mili (14) en az iki noktasından, hareket mili yatağı (15) ile ilişkilendirilmiştir.
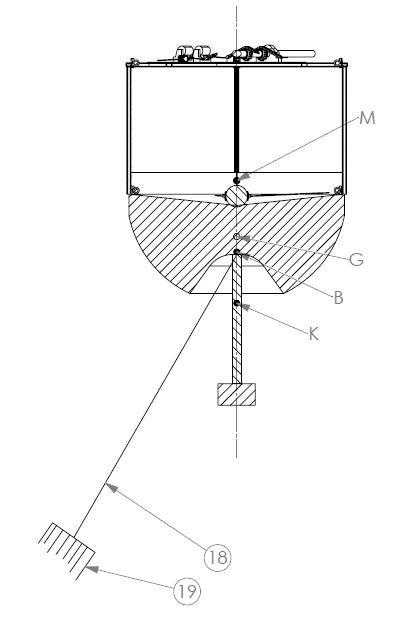
Yüzen gövde alt yüzeyi (2), su içine batırılmış olan, alt bölümüne konumlu en az bir bağlantı mili (8) bulundurur. Bahsi geçen bağlantı mili (8) en az bir denge ağırlığı (9) ile donatılmıştır. Bağlantı mili (8),ve ona bağlı olan denge ağırlığı (9) bağlantı şekli itibariyle rijit yapıda olup yüzen gövdenin (1) sabit bir parçası şeklindedir ve tüm yüzen gövde (1) salınım hareketlerine uygun hareket etmektedir.
Yüzen gövdenin (1) su kütlesi üzerinde bir konuma sabitlenebilmesi ve salınım hareketinin desteklenebilmesi için, yüzen gövdenin (1) en az bir noktasından, yüzen gövde sabitleme unsuru bağlantısı (18) vasıtasıyla yüzen gövde sabitleme unsuru (19) ile ilişkilendirilmiştir.
Yüzen gövde sabitleme unsuru (19), bir sabitleme demiri ya da yüzen gövdeyi su kütlesinin belirli bir bölümde tutabilecek ağırlıkta bir kütleden oluşturulabilmektedir.
Yüzen gövde alt yüzeyi (2) su içine batırılmış olan, alt bölümünde en az bir boşluk (20) oluşturulmuştur. Bu boşluk (20) yüzen gövde sabitleme unsuru bağlantısı (18) içine alabilecek yapıda bir açıklıktır.
Şekil 6’ya göre boşluk (20), konik yapıda bir alt açıklıktır.
Yüzen gövde (1), dalga ve benzeri su kütlesi hareketleri vasıtasıyla yüzen gövde sabitleme unsuruna (19) bağlı olarak salınım yapabilen bir kütledir. Yüzen gövde sabitleme unsuru bağlantısının (18), salınım hareketi sırasında olabildiğince yüzen gövdeye (1) teması engellenmek istenmektedir. Yüzen gövde sabitleme unsuru bağlantısının (18), yüzen gövdeye (1) her teması salınım hareketinin performansını azaltmaktadır. Oluşturulan boşluk (20) sayesinde, yüzen gövdenin (1) salınımı sırasında yüzen gövde sabitleme unsuru bağlantısı (18), yüzen gövdeye (1) minimum temas ile salınım yapabilecektir.
Şekil 6’ya göre yüzen gövde sabitleme unsuru bağlantısı (18), yüzen gövdeye (1), yüzdürme merkezi (B) noktasına mümkün olduğunca yakın bir yerden bağlanmıştır. Bahsi geçen bağlantı, yüzen cisim alt orta noktası (K)- ağırlık merkezi (G) arasına gelebilecek bir nokta üzerinden sağlanmaktadır.
Yüzdürme merkezine (B) mümkün olduğunca yakın bir yerden yüzen gövde sabitleme unsuru bağlantısını (18) bağlayabilmek için boşluğun (20) yapısı ve şekli uygun şekilde tasarlanmıştır.
Buluşa dair bir uygulamaya göre, gövde sabitleme unsuru bağlantısı (18), yüzdürme merkezi (B) noktası üzerinden yüzen gövdeye (1) bağlıdır. Bu durumda yüzdürme merkezi (B) boşluğun (20) tepe noktasında oluşturulmuştur.
Yukarıda anlatılan bu yapı sayesinde, salınım hareketi ile birlikte yüzen gövde sabitleme unsuru bağlantısı (18) boşluk (20) içerisinde, boşluk (20) duvarlarına minimum temas ile hareket edebilmektedir.
Metasantr noktası (M) yüzen gövde (1) stabil durumda iken kesit ekseni üzerinde olan yüzen cisim alt orta noktası (K), yüzdürme merkezi (B), ağırlık merkezi (G) noktalarından geçen dikey eksen üzerinde bir noktadır. Metasantr noktası (M), yüzen gövde (1) üzerinde konum olarak, ağırlık merkezinin (G) üst kısmında bir noktadır. Bu nokta yüzen gövde (1) tasarımına göre değişmektedir.
Metasantr noktası (M), Yüzen gövde (1) meyil yaptığında, yeni oluşacak batan cisim ağırlık merkezinden (B) su yüzeyine dik çizilen doğru ile stabil konumdaki yüzen gövde (1) yüzen cisim alt orta noktası (K), yüzdürme merkezi (B), ağırlık merkezi (G) noktalarından geçen eksenin kesiştiği nokta olarak tanımlanabilir.
Yüzen cisim alt orta noktası (K), yüzen gövde alt yüzeyinin (2) orta noktasını tanımlamaktadır.
Yüzdürme merkezi (B) sistemin su kütlesi içine konumlandığı durumda yüzen cismin yüzdürme merkezini tanımlar.
Ağırlık merkezi (G), yüzen gövdenin (1) yani sistemin tüm ağırlık merkezini tanımlamaktadır.
Hareket yüzeyi meyil açısı (a) ise ağırlık hareket yüzeyi (4) ile yatay eksen (X) arasında oluşan açıyı tanımlar. Hareket yüzeyi meyil açısının (a) 0˚ olduğu durum için, ağırlık hareket yüzeyi (4) düzlem şeklinde tasarlanabilmektedir.
Hareket yüzeyi meyil açısının (a) 0˚’den büyük olduğu durumlarda, ağırlık hareket yüzeyi (4) içe doğru meyilli konik bir yüzey formundadır. Hareket yüzeyi meyil açısının (a) aldığı değere göre, ağırlık hareket yüzeyinin (4) içe konik formu değişebilmektedir.
Hareket yüzeyi meyil açısının (a) 0˚’den büyük olduğu durumda, ağırlık hareket yüzeyi (4), merkezi kenarlarına göre daha çukur formda tasarlanmış bir koni yapısındadır.
Buluş dahilinde hareket yüzeyi meyil açısı (a) 0 ° ve üstü değerler alacak şekilde düzenlenebilmektedir. Oluşturulan hareket yüzeyi meyil açısı (a) düzenlenerek yüzen gövdenin (1) salınım hareketinin frekansı, su kütlesi üzerindeki dalga şiddeti ve ortam koşulları düzenlenerek ayarlanabilmektedir.
Sistem performansını ve salınım frekansının düzenlenebilmesi için kullanılabilecek bir diğer değişken ise bağlantı mili (8) uzunluğu ve denge ağırlığı (9) miktarı değiştirilebilmektedir.
Kullanılan bağlantı mili (8) uzunluğu ve denge ağırlığı (9) miktarı değiştirildiğinde yüzen gövde (1) üzerinde oluşturulan ağırlık merkezi (G) noktası değiştirilebilmektedir.
Ağırlık merkezi (G) - Metasantr noktası (M) arası mesafe ise artırarak yüzen gövdenin (1) herhangi bir tarafa meyil etmesi durumunda eski hale gelmesinin fazını kontrol edilebilmektedir. Yüzen gövde (1) salınım hareketi ile yattığında doğrulmasını sağlayan doğrulma moment kolu ağırlık merkezi (G) - metasantr noktası (M) arası mesafe arttırıldığında arttırılmış olur. Bu sayede talep edilmesi durumunda yüzen gövdenin (1) çok daha sert hareketler yapabilmesi sağlanmış olur.
Ağırlık (5), ağırlık bağlantı unsuru / unsurlarına (7) bağlı olarak ağırlık hareket yüzeyi (4) doğrultusunda, yatay eksene (X) paralel hareket edebilmektedir.
Su kütlesi yüzeyinde oluşan kuvvetler sebebiyle (örneğin dalga) yüzen gövde (1) dalga hareketine uygun olan yönde salınım yapmaktadır. Bu salınım ile birlikte yüzen gövde (1) dahilinde bulunan ağırlık (5), yüzen gövde (1) salınım hareketine uygun bir hareket içinde olacaktır. Bu hareket ise yatay eksen (X) doğrultusunda 360 ° hareket sağlayabilmektedir. Bu sayede sistem farklı yönlerden yüzen gövde (1) üzerine etkiyen kuvvet vektörlerine uygun olarak ağırlığı (5) minimum kuvvet kaybı ile hareketlendirebilmektedir.
İSTEMLER
- Dalga hareketi ile salınım yaparak enerji üretebilen, su üstünde yüzmeye uygun yapıda, yüzen gövde (1) ile ilişkili çalışan bir ağırlık (5) bulunduran bir yüzen gövde (1) yapılanması olup özelliği; yatay eksen (X) üzerinde 360˚’lik hareket alanında, her bir yöne hareket edebilen ağırlık (5) bulundurmasıdır.
- İstem 1’e göre bir yüzen gövde (1) yapılanması olup özelliği; ağırlığın (5) hareket edeceği ağırlık hareket yüzeyi (4) ve ağırlık hareket yüzeyi yan bariyerleri (3) ile donatılmış yüzen gövde alt yüzeyi (2) bulundurmasıdır.
- İstem 1’e göre bir yüzen gövde (1) yapılanması olup özelliği; küre formunda ağırlık (5) bulundurmasıdır.
- İstem 3’e göre bir yüzen gövde (1) yapılanması olup özelliği; ağırlık bağlantı unsuru / unsurları (7) ile ilişkilendirilmiş ağırlık dış unsuru (6) ile donatılmış ağırlık (5) bulundurmasıdır.
- İstem 4’e göre bir yüzen gövde (1) yapılanması olup özelliği; hem ağırlığın (5) serbest dönme hareketine hem de içinde tutulabilmesine izin verecek şekilde bir dış bilezik formunda olan ağırlık dış unsurunu (6) bulundurmasıdır.
- İstem 4’e göre bir yüzen gövde (1) yapılanması olup özelliği; ip, zincir ya da ip ve zincirin çeşitli karışımlarından oluşabilen bağlantı unsuru / unsurlarını (7) bulundurmasıdır.
- İstem 4’e göre bir yüzen gövde (1) yapılanması olup özelliği; ağırlık bağlantı unsurlarının (7) bağlanmasına uygun yapıda ağırlık bağlantı elemanları (17) ile donatılmış ağırlık dış unsurunu (6) bulundurmasıdır.
- İstem 2’ye göre bir yüzen gövde (1) yapılanması olup özelliği; ağırlık bağlantı unsurlarının (7) üzerinde hareketine uygun yapıda, yönlendirme makaraları (16) bulunduran ağırlık hareket yüzeyi yan bariyerleri (3) içermesidir.
- İstem 1’e göre bir yüzen gövde (1) yapılanması olup özelliği; farklı ya da özdeş yapıda yay kesit formundaki parçaların birleşiminden oluşmuş bir dış yüzey formunda olan, yüzen gövde alt yüzeyini (2) bulundurmasıdır.
- İstem 1’e göre bir yüzen gövde (1) yapılanması olup özelliği; küre parçası formunda dış yüzeye sahip yüzen gövde alt yüzeyini (2) bulundurmasıdır.
- İstem 1’e göre bir yüzen gövde (1) yapılanması olup özelliği;
• ağırlık hareket yüzeyi yan bariyerleri (3) üzerine konumlu taşıyıcı ayaklar (10) üzerinde, platform yüzeyini (11), - İstem 1’e göre bir yüzen gövde (1) yapılanması olup özelliği; yüzen gövdenin (1) sabit bir parçası formunda olabilen en az bağlantı mili (8) ve en az bir denge ağırlığı (9) bulundurmasıdır.
- İstem 1’e göre bir yüzen gövde (1) yapılanması olup özelliği; yüzen gövde sabitleme unsuru bağlantısı (18) vasıtasıyla yüzen gövdenin (1) en az bir noktasından ilişkilendirilmiş, yüzen gövde sabitleme unsuru (19) bulundurmasıdır.
- İstem 13’e göre bir yüzen gövde (1) yapılanması olup özelliği; bir sabitleme demiri ya da yüzen gövdeyi su kütlesinin belirli bir bölümde tutabilecek ağırlıkta bir kütleden oluşan yüzen gövde sabitleme unsuru (19) bulundurmasıdır.
- İstem 1’e göre bir yüzen gövde (1) yapılanması olup özelliği;
• Hareket yüzeyi meyil açısının (a) 0˚ olduğu durum için, düzlem şeklinde ağırlık hareket yüzeyini (4), - İstem 15’e göre bir yüzen gövde (1) yapılanması olup özelliği; hareket yüzeyi meyil açısının (a) 0˚’den büyük olduğu durumda, merkezi kenarlarına göre daha çukur formda tasarlanmış bir koni yapısında ağırlık hareket yüzeyi (4) bulundurmasıdır.
- Dalga hareketi ile salınım yaparak enerji üretebilen, su üstünde yüzmeye uygun yapıda, yüzen gövde (1) ile ilişkili çalışan bir ağırlık (5) ve yüzen gövde sabitleme unsuru bağlantısı (18) vasıtasıyla yüzen gövdenin (1) en az bir noktasından ilişkilendirilmiş, yüzen gövde sabitleme unsuru (19) bulunduran bir yüzen gövde (1) yapılanması olup özelliği;
• yüzen gövde alt yüzeyinin (2) su içine batırılmış olan, alt bölümünde en az bir boşluk (20) ve - İstem 17’ya göre bir yüzen gövde (1) yapılanması olup özelliği; konik yapıda bir alt açıklık formunda bir boşluk (20) bulundurmasıdır.
- İstem 17’ya göre bir yüzen gövde (1) yapılanması olup özelliği; boşluğun (20) tepe noktasında oluşturulmuş yüzdürme merkezine (B) bağlı, yüzen gövde sabitleme unsuru bağlantısı (18) bulundurmasıdır.
• aktarılan ağırlık bağlantı unsurlarını (7) , hareket miline (14) yönlendirebilen platform yüzeyine (11) konumlu yönlendirme makaralarını (16),
• hareket miline (14) aktarılan ağırlık bağlantı unsurlarını (7), uç kısımlarından sabitleyen tansiyon birimi / birimlerini (12),
• en az iki noktasından, hareket mili yatağı (15) ile ilişkilendirilmiş hareket milini(14),
• ağırlık bağlantı unsurlarından (7) gelen hareketin, hareket miline (14) aktarılmasını sağlayan kavrama ünitesini/ünitelerini (13) bulundurmasıdır.
• hareket yüzeyi meyil açısının (a) 0˚’den büyük olduğu durumlarda, içe-merkeze doğru meyilli konik bir yüzey formunda ağırlık hareket yüzeyini (4) bulundurmasıdır.
• yüzen cisim alt orta noktası (K)- ağırlık merkezi (G) arasına gelebilecek bir nokta üzerinden bağlanarak bahsi geçen boşluk (20) içinde kalabilen, yüzen gövde sabitleme unsuru bağlantısı (18) bulundurmasıdır.
ÖZET
DALGA HAREKETİ ile salınım yaparak enerji üretebilen YÜZEN GÖVDE yapılanması
Buluş, deniz ve benzeri su kütleleri üzerinde oluşan dalga ve benzeri su hareketleri ile kontrol edilebilen sınırlı salınım gösterebilen ve bu hareketin enerji dönüşümü için kullanılabildiği bir yüzen gövde yapılanmasına ilişkindir.
Şekil 01
Şekil 02

Şekil 03
Şekil 04
Şekil 05
Şekil 06
Şekil 07