Buluşumuz bir rüzgar türbini hareket sistemi olup amacımız rüzgar enerjisinden optimum verimi alacak bir düzenek kurmaktı.
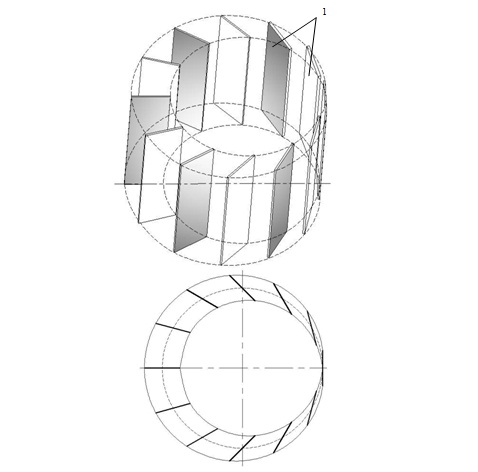
Şekillerin Açıklaması1. Bir rüzgar türbini hareket sisteminin çeşitli kanat yapılarının yakından görünümü
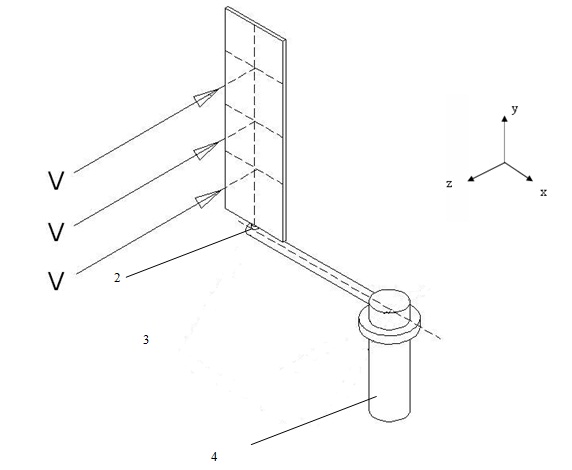
2. Bir rüzgar türbini hareket sisteminin rüzgarın yönünün kanat düzlemine 90º açıyla çarpması
durumu ( z ekseni ile 0° açı yaptığı durum) için tek kanadın ayrıntılı görünümü (başlangıç noktası)
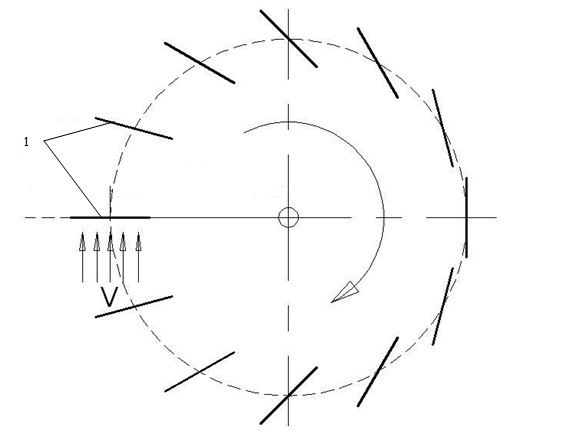
3. Bir rüzgar türbini hareket sisteminin rüzgarın kanat düzlemine farklı açılarla çarptığı durumlar için kanat konumlarının gösterildiği üstten görünümü
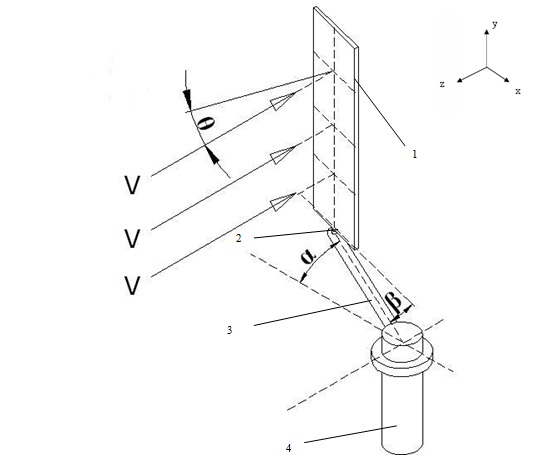
4. Bir rüzgar türbini hareket sisteminin dönmesiyle beraber kanadın rüzgarı karşılama açısının değiştiğini gösteren durumu için tek kanadın ayrıntılı görünümü
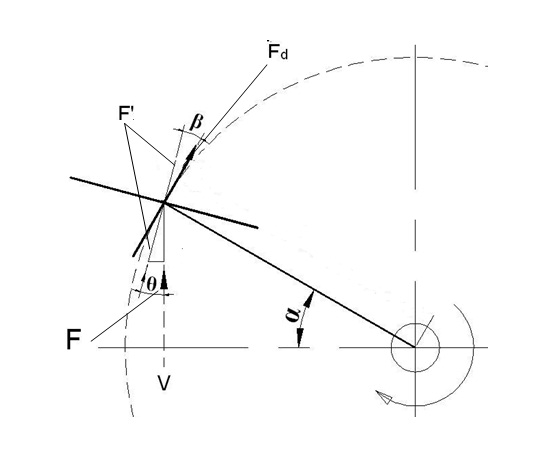
5. Bir rüzgar türbini hareket sisteminin tek kanat üzerine etkiyen kuvvetleri ve bahsi geçen kuvvetlerin açılarının gösterimi
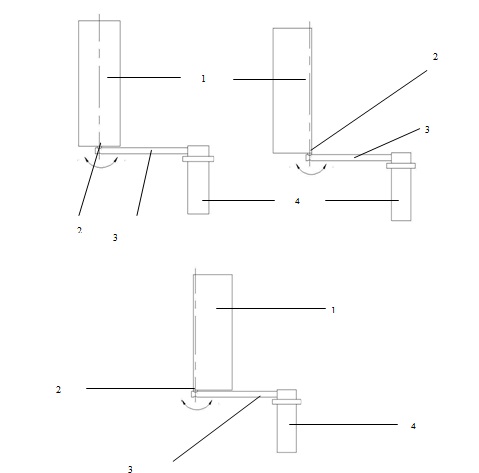
6. Bir rüzgar türbini hareket sisteminin çeşitli kanat sabitleme durumlarının gösterimi
7. Bir rüzgar türbini hareket sisteminin dönmesi sırasında kanatların taradığı alanın gösterimi
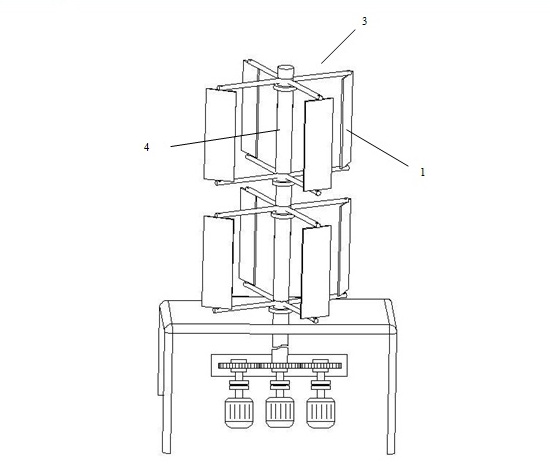
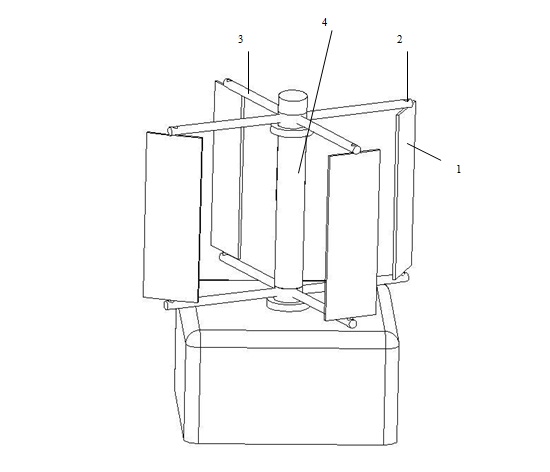
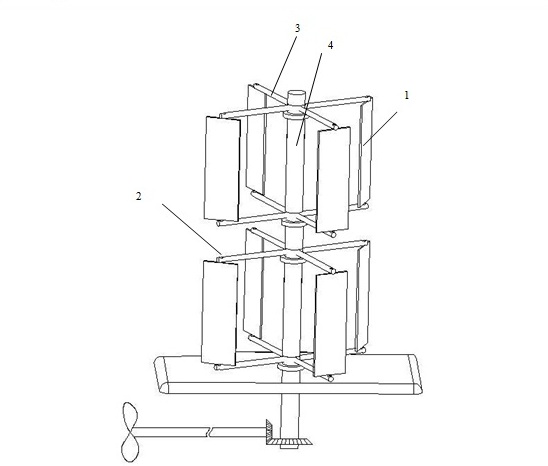
8. Bir rüzgar türbini hareket sisteminin topluca yandan görünümü
9. Bir rüzgar türbini hareket sisteminin deniz araçları için uygulamasına verilebilecek sistemin ayrıntılı görünümü
10. Bir rüzgar türbini hareket sistemi dahilinde hareket sisteminin elektrik üretimi için kademeli kontrol edilebilmesini amaçlayan tasarı yapının görünümü
Parçaların Açıklaması
1. Kanat
2. Yataklama noktası
3. Kanat destek kolu
4. Kanat hareket mili
5. Kanat olukları
S. Hava akımındaki kanadın yüzey alanı
θ. Rüzgarın kanada z eksenine göre çarpma açısı
α. Kanat destek kolunun başlangıç noktası ile yapmış olduğu dönme açısı
β. Kanadın kendi kanat destek koluyla x ekseni düzlemine göre yapmış olduğu açı
F. Kanat yüzeyine z ekseni doğrultusunda etki eden kuvvet
F’. Kanat yüzeyine z ekseni doğrultusunda etki eden kuvvetin kanat düzlemine dik olan bileşeni
Fd. Kanat yüzeyine z ekseni doğrultusunda etki eden kuvvetin bileşeni F’ nün kanat destek koluna dik açı yapan bileşeni
V. Rüzgarın hızı
Buluşumuz olan bir rüzgar türbini hareket sisteminin yapısı içerisinde rüzgardan hareket alınması için bir pervane kanat sistemi yerine bağımsız kanatlara (1) sahip çoklu kanatlı (1) hareket sistemi bulundurduğu için sistemin rüzgar temas yüzeyi dolayısıyla sistem çalışma verimi arttırılmıştır.
Buluşumuz olan bir rüzgar türbini hareket sistemi dahilinde bulunan kanatlar (1) yataklama noktası (2) çevresinde serbest dönüş hareketi yapabildiği için, kanatların (1) her biri rüzgar yönüne göre ayrı ayrı düzenlenebilmektedir. Bu sayede rüzgar hareketinden maksimum verim ile enerji sağlanabilmektedir.
Buluşumuzun yapısının rüzgar yönüne göre düzenlenebilmesi için sadece kanatların (1) düzenlenmesi yeterli olmaktadır. Bu sayede sistemin rüzgar yönüne uygun şekilde düzenlenebilmesi için kurulum ve işletim maliyeti yüksek elektrik motorlarının kullanımına gerek kalmamaktadır.
Buluşumuz olan bir rüzgar türbini hareket sistemi tarifname ve istemler dahilin de anlatılırken x,y,z koordinat sistemi referans alınmıştır. Bu doğrultuda y ekseni kanat uzun kenarı boyunca uzanmaktadır.
Buluşumuz olan bir rüzgar türbini hareket sistemi tarifname ve istemler dahilin de anlatılan başlangıç noktası tabiri, bir rüzgar türbini hareket sisteminin rüzgarın yönünün kanat düzlemine 90º açıyla çarpması durumunu ( z ekseni ile 0° açı yaptığı durum) yani buluşumuz olan rüzgar türbininin ilk durumunu belirtmektedir.
Buluşumuz olan bir rüzgar türbini hareket sistemi yapısı içerisinde dikey konumlandırılmış en az bir kanat hareket mili (4), bahsi geçen kanat hareket mili (4) üzerinde, kanat (1) sayısı ile orantılı, her kanat (1) için en az iki adet konumlandırılmış kanat destek kolu (3), bahsi geçen kanat destek kolları (3) üzerinde her kanat destek koluna (3) en az bir yataklama noktası (2) vasıtasıyla bağlanmış kanatlar (1) bulundurmaktadır.
Yukarıda bahsedilen kanatlar (1) kanat destek kollarına (3) en az bir yataklama noktasından (2) sabitlendikleri için kanatlar (1) hareket merkez noktası yataklama noktası (2) olacak şekilde serbest hareket edebilmektedir.
Kanatlar (1) tercihen dikdörtgen kesitli seçilmiştir. Kanatlar (1) üzerinde, rüzgarın kanatlar (1) üzerinde oluşturduğu etkiyi arttırmak amacıyla her kanat (1) üzerine kanat olukları (5) konumlandırılmıştır. Rüzgar kanada (1), rüzgarın kanada z eksenine göre çarpma açısı (θ) 0° açıyla çarptığında hareketli hava partikülleri kanatla (1) x,y eksenine göre dikey olarak çarpışmaktadır ve bu durumda hareketli hava partiküllerinin tüm kinetik enerjisi kanat (1) tarafından alınmaktadır. Ancak rüzgarın kanada z eksenine göre çarpma açısı (θ) 0º den farklı bir değer olduğunda kanat (1) yüzeyine etki eden hareketli hava partiküllerinin bir kısmı kanat (1) üzerinden akıp geçmektedir. Kanat olukları (5) kanat (1) üzerinden havanın kolayca kayıp geçmesini engellemekte ve hareketli hava partiküllerinin çarpma etkisinin yani rüzgarın itme gücünün kanatlara (1) daha fazla etkimesini sağlamaktadır. Buna ek olarak da verimi arttırıcı etkisi nedeniyle hava partiküllerinin sürtünme etkisinden de faydalanılabilmektedir. Bahsi geçen sürtünme etkisi ve dolayısıyla oluşan kuvvetin yönünde, kanat (1) üzerine konumlandırılan kanat oluklarının (5) yani küçük direnç yüzeylerinin yapısı düzenlenerek, istenilen yönde ve şeklide oluşması sağlanabilmektedir.
Buluşumuz dahilinde rüzgarın kanatlar (1) üzerindeki etkisinin saptanması için aşağıdaki denklikler kullanılmıştır. Denklikler dahilinde;
q = Rüzgarın kinetik enerjisiρ = Havanın özgül ağırlığı
V = Rüzgarın hızı
T = Tork kuvveti
F = Kanat yüzeyine z ekseni doğrultusunda etki eden kuvvet
R = Kanat destek kolu uzunluğu
S = Hava akımındaki kanadın yüzey alanı
q = 1/2 ρ V²
Yukarıda belirtilen denklik vasıtasıyla rüzgarın kinetik enerjisi bulunmaktadır. Rüzgar hareketine maruz kalan bir kanada (1), rüzgarın kanada z eksenine göre çarpma açısı (θ) 0° olduğu durumda, kanat yüzeyine z ekseni doğrultusunda etki eden kuvvet (F) hesaplandığında aşağıdaki denklik ortaya çıkmaktadır. Denklik incelendiğinde kanat yüzeyine z ekseni doğrultusunda etki eden kuvvet (F) büyüklüğünün kanat alanına ve rüzgar hızına (V) bağlı olduğu görülecektir.
F = q.SKanatlara (1) bağlı olan kanat destek kolu (3) vasıtasıyla hava akımındaki kanat yüzey alanı üzerinde oluşan, kanat yüzeyine z ekseni doğrultusunda etki eden kuvvet (F) kanat hareket mili (4) üzerinde bir Tork oluşturmaktadır. Ortaya çıkan Tork kuvveti ile ilgili denklikler aşağıda sunulmuştur.
T = F.RT = q.S.R
Yukarıda sunulan denklikler rüzgarın kanada z eksenine göre çarpma açısı (θ) 0° olduğu durum için geçerlidir. Başlangıçta sistem dolayısıyla kanatlar (1) sabit olduğu için rüzgarın kanada z eksenine göre çarpma açısı (θ) 0° olacaktır ama kanada (1) çarpan ilk hava partiküllerinin etkisiyle, sistem dahilinde bulunan kanat hareket mili (4) dolayısıyla kanatlar (1) hareket etmeye başlamaktadır. Böylece sistemin dönmesiyle hava akımındaki kanadın (1) yüzey alanının rüzgarı karşılama açısı değişmekte, sonuç olarak hava akımındaki kanat (1) yüzey alanı üzerinde oluşan kanat yüzeyine z ekseni doğrultusunda etki eden kuvvetin kanat düzlemine dik olan bileşeni (F´) değişmektedir. Sistem dahilinde kanat hareket milinin (4) dönme hareketini sağlayan dolayısıyla enerji üretimi sağlayan, kanat yüzeyine z ekseni doğrultusunda etki eden kuvvetin kanat düzlemine dik olan bileşeni (F´) dir. Kanat yüzeyine z ekseni doğrultusunda etki eden kuvvetin kanat düzlemine dik olan bileşeni (F´) ile ilgili denklik aşağıda sunulmuştur.
F´ = F.Cos θ yani F´ = q.S.Cos θYukarıda bahsedildiği gibi sistemin enerji üretmesi için gerekli hareketin sağlandığı kuvvet Tork kuvvetidir ve bahsi geçen tork kuvveti kanat yüzeyine z ekseni doğrultusunda etki eden kuvvetin kanat düzlemine dik olan bileşeni (F´) etkisi altındadır. Kanat hareket milinin (4) hareketi ise temelde kuvvet destek koluna (3) etkiyen, kanat yüzeyine z ekseni doğrultusunda etki eden kuvvetin bileşeni F’ nün kanat destek koluna dik açı yapan bileşeni (Fd) tarafından sağlanmaktadır. Bu durumda sistem için kuvvet denkliği aşağıdaki gibi olacaktır.
Fd = F´.CosβBu durumda Tork kuvveti için denklik ise;
T = R.q.S.Cosθ.Cosβ
Yukarıdaki sunulmuş olan denklikler incelendiğinde sistemden maksimum verim alınabilmesi için denkliklerde belirtilen R yani kanat destek kolu (3) uzunluğu, S yani hava akımındaki kanat yüzey alanı, rüzgarın hızı (V), rüzgarın kanada z eksenine göre çarpma açısı (θ) ve kanadın kendi kanat destek koluyla x ekseni düzlemine göre yapmış olduğu açı (β) bağlıdır. Sistem kurulumu yapılırken kanat destek kolu (3) uzunluğu ve hava akımındaki kanat yüzey alanı kullanıcı tercihine göre kurgulanabilmekte, rüzgarın hızı (V) ise sistemin konumlandırıldığı ortam şartlarına ve sistemin kullanıldığı döneme göre değişmektedir. Sistemin enerji veriminin arttırılabilmesi için yukarıdaki denkliklere göre kullanıcı tarafından tek düzenlenebilen değişken olan Cosθ.Cosβ değerinin en büyük değerde olması sağlanmalıdır. Cosθ.Cosβ çarpım değerinin olabilecek en yüksek değerde tutulabilmesi içinse kanat (1) anlık pozisyonlarının sürekli kontrol adlında tutulması yani rüzgarın kanada z eksenine göre çarpma açısı (θ) ve kanadın kendi kanat destek koluyla x ekseni düzlemine göre yapmış olduğu açı (β) maksimum veriminin alınacağı şeklide düzenlenmesi gerekmektedir.
Buluşumuz dahilinde verimin dolayısıyla Cosθ.Cosβ değerinin maksimize edilebilmesi için çeşitli denemeler yapılmış ve sonuç olarak maksimum değerinin θ = α/2 ve β = α/2 olması durumunda sağlandığı gözlenmiştir.
Rüzgarın kanatlara (1) vurmasıyla beraber kanat hareket mili (4) ekseninde kanatlar (1) dönmeye başlar ve dolayısıyla her kanadın (1) bulunduğu anlık konuma göre başlangıç noktası referans alınarak kanat destek kolunun başlangıç noktası ile yapmış olduğu dönme açısı (α) değişmektedir. Sürekli dönen kanatlarla (1) beraber değişen kanat destek kolunun başlangıç noktası ile yapmış olduğu dönme açısı (α) bir aygıt tarafından ölçülmeli ve maksimum verimin alınabilmesi için Cosθ.Cosβ çarpımının maksimum değeri alabileceği şekilde, kanat (1) konumları θ = α/2 ve β = α/2 değerlerini alacak şekilde düzenlenmelidir.
Kanat (1) konumlarının, rüzgarın kanada z eksenine göre çarpma açısı (θ) ve kanadın kendi kanat destek koluyla x ekseni düzlemine göre yapmış olduğu açı (β) uygun değer olan α/2 değerine getirilebilmesi için kanatlar (1) bir elektronik yönlendirme aparatı kullanılarak yönlendirilmektedir. Kanat destek kolunun başlangıç noktası ile yapmış olduğu dönme açısı (α), elektronik yönlendirme sistemi vasıtasıyla ölçülerek, rüzgarın kanada z eksenine göre çarpma açısı (θ) ve kanadın kendi kanat destek koluyla x ekseni düzlemine göre yapmış olduğu açıyı (β), kanat konumunu değiştirerek sürekli düzenlenmektedir. Sitemin hareketiyle beraber her kanadın (1) konumu değiştiğinde kanada (1) ait kanat destek kolunun başlangıç noktası ile yapmış olduğu dönme açısı (α) değişmekte bu değişen değerlere göre de elektronik yönlendirme aparatı rüzgarın kanada z eksenine göre çarpma açısını (θ) ve kanadın kendi kanat destek koluyla x ekseni düzlemine göre yapmış olduğu açıyı (β), α/2 olarak sürekli düzenlemektedir.
Yukarıda anlatılan kanat pozisyonlarının dolayısıyla rüzgarın kanada z eksenine göre çarpma açısının (θ) ve kanadın kendi kanat destek koluyla x ekseni düzlemine göre yapmış olduğu açının (β) düzenlenebilmesi için sistem dahilinde kullanılacak elektronik yönlendirme sistemi her kanada (1) ayrı ayrı bağlanmış yönlendirme ünitelerinden de oluşabildiği gibi tüm kanatlar (1) için toplu bir yönlendirme ünitesi de kullanılabilmektedir.
Buluşumuz olan bir rüzgar türbini hareket sistemi tekniğin olağan durumu içerisinde kullanılan benzerlerinde olduğu gibi rüzgar enerjisinden elde edilen mekanik enerjiyi bir alternatör vasıtasıyla elektrik enerjisine çevirebilmektedir. Benzer olarak elektrik enerjisi elde etmek yerine rüzgar türbini hareket sisteminden alınan mekanik enerji yine kanat hareket miline (4) bağlanmış bir dişli ve değişik aparatlarla yelkenli gemilerde hareket sağlamak amacıyla yelken yerine kullanılabilmektedir. Rüzgar türbini hareket sistemi rüzgardan alınan mekanik enerjiyi bu durumda direkt hareket pervanelerine aktarılmakta ve yelkene ya da benzeri hareket ekipmanlarına gerek kalınmaksızın deniz taşıtını hareket ettirmektedir.
Buluşumuz olan bir rüzgar türbini hareket sistemi kullanılarak enerji üretilebilmesi için bir rüzgar türbini hareket sistemi ünitesi kullanılabileceği gibi birden fazla rüzgar türbini hareket sistemi akuple olarak kullanılabilmektedir. Yine tekniğin olağan durumunda yer alan rüzgar türbinlerinde olduğu gibi buluşumuz olan rüzgar türbini hareket sistemi içerisinde de birden fazla alternatör veya mekanik sistem bir kontrol ünitesi tarafından kademeli olarak aktif olacak şekilde kontrol edilebilmektedir. Kontrol ünitesi rüzgar hızına dolayısıyla rüzgar enerjisine bağlı olarak sistem dönüş hızını ve sitem hareketlerini kontrol etmektedir.Bu kontrollerden aldığı bilgilere bağlı olarak ek alternatör veya mekanik sistemleri kademeli olarak devreye alıp çıkararak enerji kaybını önlemekte, tasarlanan sistemin çok daha değişken hava şartlarında oldukça yüksek bir çalışma verimliliğiyle çalışmasını sağlamaktadır. Bahsi geçen kontrol ünitesi sistemi frenleyerek ya da kanatların (1) rüzgar ile daha az açı yapıp daha az güç elde edeceği şekilde kontrol ederek yüksek rüzgar hızlarında sistemin zarar görmesini engellemektedir.
Buluşumuz olan bir rüzgar türbini hareket sisteminin esas amacı yukarıda anlatıldığı üzere rüzgar enerjisinden maksimum verimi elde etmek üzerine kurulmuş olmasına rağmen sistemin bakım periyotlarında, istenmeyen fırtına durumlarında sistemi korumak amacıyla kanatları rüzgarla aynı yöne çevirerek minimum yüzey alanı oluşmasını sağlayan veya tamamen sistemi durduran kontrol sistemi kullanılır.
Kullanılacak olan bu kontrol sistemi tekniğin bilinen değişik sensörlerini içerip ve bu sensörlerden aldığı bilgileri PC-PLC içerikli bir analiz ve bu analize bağlı yüklenmiş programa göre sistemi ve kanat (1) açılarını yardımcı mekanik sistemlerle kontrol edebilir. Sistem veya kanatlar (1) dişli sistem, zincirli sistem servomotorlar, hidrolik sistem, pnomatik sistem içerikli bir kontrol sistemi vasıtasıyla tekniğin bilinen birçok seçeneğinden biri tasarladığımız sisteme adapte edilebilmektedir.
Buluşumuz olan bir rüzgar türbini hareket sistemi dikey eksenli kullanılabildiği gibi bazı modellerinde yatay eksenli olarak da kullanılabilmektedir. Dikey eksenli kullanımlarda kanat hareket mili (4) sistem içerisinde dikey olarak konumlandırılmıştır. Yatay eksenli kullanımlarda ise kanat hareket mili (4) sistem içerisinde yatay olarak konumlandırılmıştır.
İNCELEME ÖNCESİ REVİZE EDİLMİŞ İSTEMLER
1. Buluşumuz dikey konumlandırılmış en az bir kanat hareket mili (4), bahsi geçen kanat hareket mili (4) üzerinde, kanat (1) sayısı ile orantılı, her kanat (1) için en az iki adet konumlandırılmış kanat destek kolu (3), bahsi geçen kanat destek kolları (3) üzerinde her kanat destek koluna (3) en az bir yataklama noktası (2) vasıtasıyla bağlanmış kanatlar (1) bulunduran ve bahsedilen kanatların (1) hareket merkez noktası, yataklama noktası (2) olacak şekilde bir yönlendirme sistemi kullanılarak kanatların hareket ettirilebildiği bir rüzgar türbini hareket sistemi olup özelliği, kanat (1) yönelimlerinin yani açılarının ,sürekli optimumum verimi sağlayacak şekilde, rüzgarın kanada z eksenine göre çarpma açısı (θ) ve kanadın kendi kanat destek koluyla x ekseni düzlemine göre yapmış olduğu açının (β) sürekli kanat destek kolunun başlangıç noktası ile yapmış olduğu dönme açısının (α) yarısı olarak düzenlenmesidir.
2. İstem birde anlatılan rüzgar türbini hareket sistemi olup özelliği,
• rüzgarın kanatlara (1) vurmasıyla beraber kanat hareket mili (4) dönmeye başlaması ile her kanadın (1) bulunduğu anlık konuma göre başlangıç noktası referans alınarak kanat destek kolunun başlangıç noktası ile yapmış olduğu dönme açısının (α) bir aygıt tarafından anlık olarak sürekli ölçülmesi,
• Alınan anlık değerelere göre rüzgarın kanada z eksenine göre çarpma açısının (θ) ve kanadın kendi kanat destek koluyla x ekseni düzlemine göre yapmış olduğu açının (β) α/2 değerini alacak şekilde bir elektronik kanat (1) yönlendirme aparatı tarafından sürekli olarak ayarlanması.
3. Yukarıdaki istemlerde anlatılan elektronik yönlendirme aparatı olup özelliği, her bir kanat (1) için anlık olarak ölçülen ve her bir kanat için farklı olabilen ,kanat destek kolunun başlangıç noktası ile yapmış olduğu dönme açısını (α) ölçmesi ve her bir kanadın (1) z eksenine göre çarpma açısını (θ) ve kanadın kendi kanat destek koluyla x ekseni düzlemine göre yapmış olduğu açıyı (β) her bir kanat (1) için ayrı ayrı α/2 değerini alacak şekilde anlık ayarlayabilmesidir.
ÖZET
BİR RÜZGAR TÜRBİNİ HAREKET SİSTEMİ
Buluşumuz, rüzgârdaki kinetik enerjiyi önce mekanik enerjiye daha sonra da elektrik enerjisine dönüştüren bir rüzgar türbini hareket sistemiyle ilgilidir.
Şekil 01

Şekil 02
Şekil 03
Şekil 04
Şekil 05
Şekil 06
Şekil 07
Şekil 08
Şekil 09
Şekil 10