EVET YENİ YAKLAŞIM TARZIM
2009-2010 prototip çalışmalarımda sistemin verimli olduğu teyit edildi. Fakat cyclogyro / cyclocopter çalışma prensibi gereği kanadın dönme ekseninde devamlı farklı açılar alması sistemin stabilitesini olumsuz yönde çok etkilediği de görüldü. Ayrıca internet ortamındaki görsellerden anlaşıldığı kadarı ile D-dallus firmasının çalışmalarında da kısmen bu gözlenmektedir. Bu noktada stabilite konusunu daha kolay çözebileceğimize inandığım yeni bir yaklaşım tarzı benimsedim. Bu yaklaşım tarzına göre kanatlar döngüsel hareketin sadece yarısında aktif, reel iş yapacak diğer yarısın da ise etkisiz / nötr bir konum alacaktır. Böylece sistemin kısmen verimliliği düşmüş olsa da yine helikopterlere göre oldukça verimli olacak ve bunun yanında da sistemin mekanizması, kontrol sistemi çok daha sade ve hafif olacak, çok daha kolay uçabilir, çok daha kolay kontrol edilebilir olabilecektir;
İşte yeni yaklaşım tarzımın ayrıntısı ,
ANİMASYON GÖSTERİM
Animasyonda, dairesel döngüdeki kanatların, dönme eksenine göre almış oldukları hücum açılarına dikkat edilecek olursak, kanatlar sadece yarım daire boyunca ( 180 derecelik bir döngüsel harekette ) ve bizim belirlediğimiz bir hücum açısıyla reel olarak iş yapmakta diğer yarım daire boyunca ise döngüsel daire ekseniyle aynı açıda hareket ettiği için reel olarak iş yapmamaktadır. Kanatların hücum açısı alarak aktif iş yaptığı bu yarım dairelik yörüngenin konumu ve açısı bizim tarafımızdan kontrol edilebilir durumdadır. Kanatların reel olarak iş yapıp itme-kaldırma kuvveti oluşturduğu yarım dairesel döngünün iki boyutlu gösterimleri şekil :1 ve şekil : 2 ‘de gösterilmiştir.
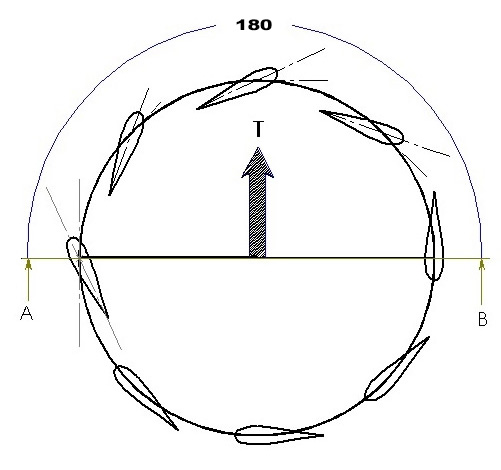
Şekil : 1
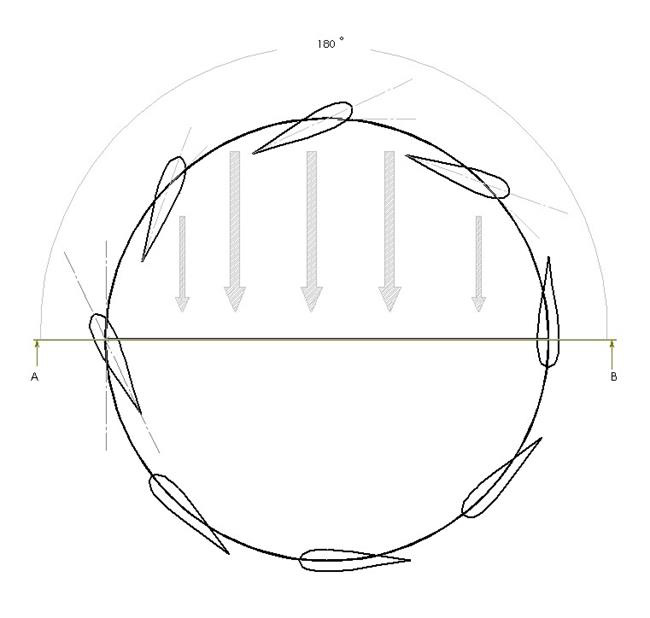
Şekil : 2
Şekil : 1’ de döngüsel harekette AB kesitinin üst yarım dairesi boyunca ( 180 derecelik bir döngüde ) kanatların almış oldukları sıfırdan farklı açı durumları gösterilmiş ve kanatların bu durumu için kaldırma kuvvetinin yönü belirtilmiştir.
Şekil : 2’ de ise yine aynı şekilde AB kesitinin üst yarım dairesi boyunca kanatların açılı bir döngüsel hareketinde hava akımının yönü şematize edilmiştir. Kanatlar reel olarak iş yapmakta ve havayı aşağıya doğru- ok işaretleri yönünde iterken sistemi yukarı doğru kaldırmaya çalışmaktadır.
Bu çalışma prensibiyle sistemdeki kanatların açılarını kontrol eden mekanizmanın çok daha basit yapıda olacağı ve dolayısıyla hafif olacağı, sadece yarım daire boyunca kanatların yönlendirilmesiyle sistemin stabilite probleminin daha kolay aşılabileceğini düşünmekteyim. Böylece daha hafif ve daha stabil, kişisel bir hava aracı oluşturmak sadece uygun bir ekip, uygun bir iş birliği ve biraz da çalışmaya kalıyor.