HAVA ARAÇLARI İÇİN KULLANILABİLEN KONTROL EDİLEBİLİR HAREKET SİSTEMİ
Sistemimiz, bulundurduğu kanatları topluca kontrol ederek hareket rejimini, dolayısıyla yönünü kontrol edilebilen, sikloidal rotor bulunduran hareket mekanizmasına ilişkindir. İlgili hareket mekanizması hava taşıtlarının yönlendirilmesi için kullanılabilir yapıdadır.
Şekillerin Açıklanması
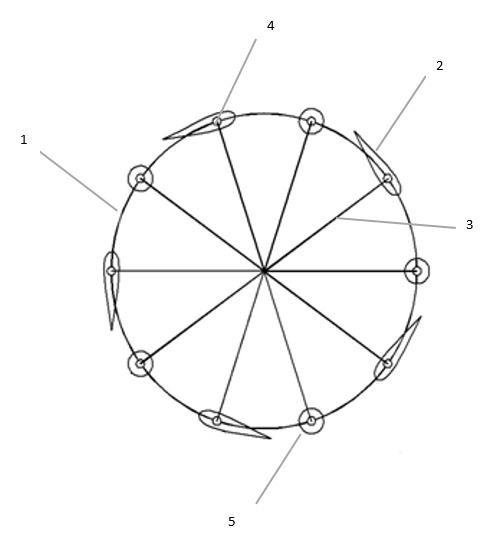
Şekil 1. Kanatlarının 0° hücum açısı aldığı pozisyonda hareket mekanizmasının dairesel kesitinin gösterimi
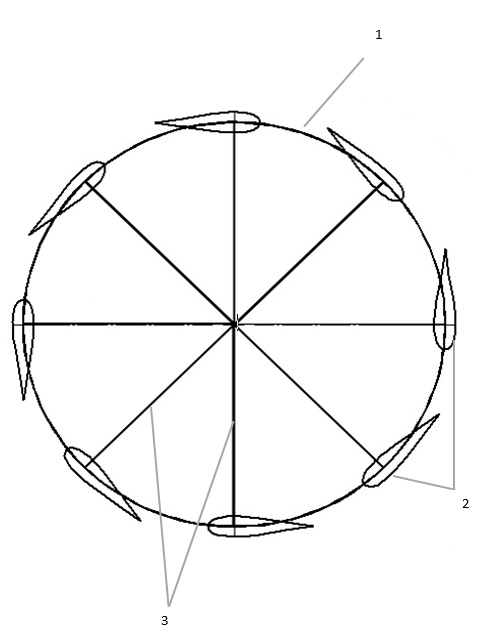
Şekil 2. Kanatların hareket ekseni üzerinde ayrıca gösterimi
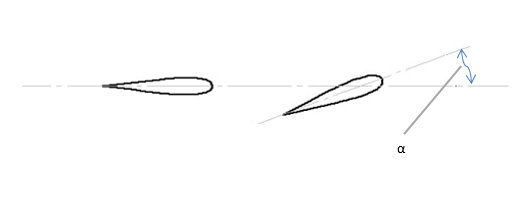
Şekil 3. Kanat yapısının gösterimi
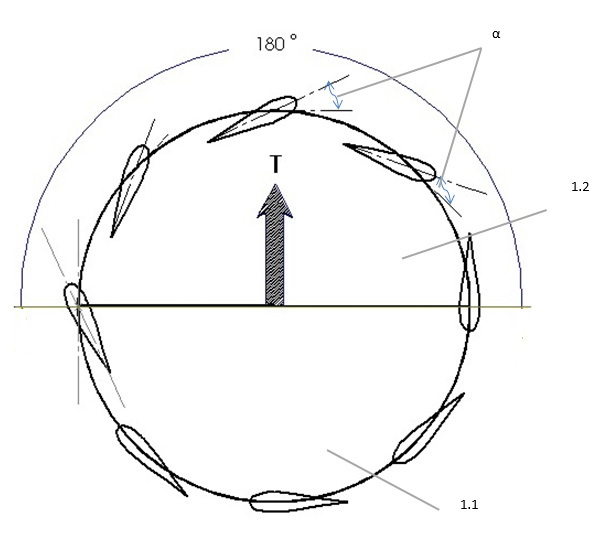
Şekil 4. 180 ° bölümünde kanatlara hücum açısı verilmiş diğer bölümde ise kanatlarının 0° hücum açısı aldığı pozisyonda hareket mekanizmasının dairesel kesitinin gösterimi
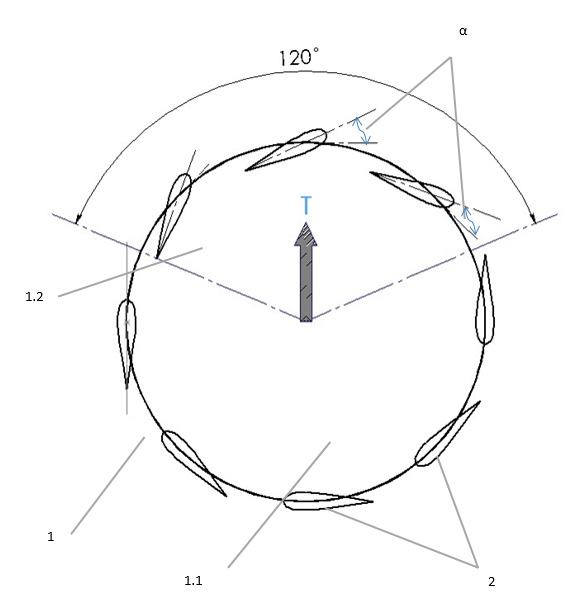
Şekil 5. 120 ° bölümünde kanatlara hücum açısı verilmiş diğer bölümde ise kanatlarının 0° hücum açısı aldığı pozisyonda hareket mekanizmasının dairesel kesitinin gösterimi
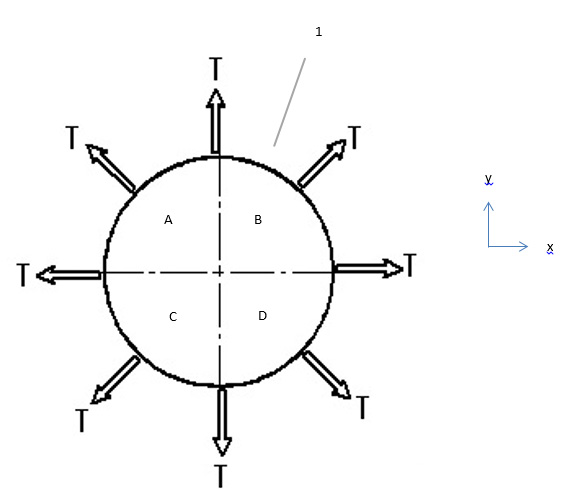
Şekil 6. Hareket mekanizması tarafından oluşturabilen kuvvet vektörlerinin yön seçeneklerinin görünümü
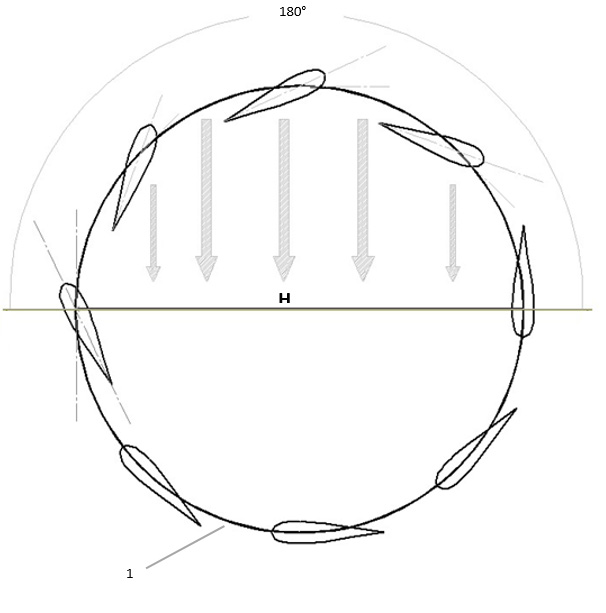
Şekil 7. 180 ° bölümünde kanatlara hücum açısı verilmiş diğer bölümde ise kanatlarının 0° hücum açısı aldığı pozisyonda hareket mekanizmasının dairesel kesitinin ve hava akış yönünün gösterimi
Şekil 8. Ara ağırlıkları ve kanatları bulunduran hareket mekanizmasının dairesel kesitinin görünümü
Şekillerdeki Referansların Açıklaması
- 1. Hareket mekanizması dairesel kesiti
1.1.Birincil dairesel kesit yayı
1.2.İkincil dairesel kesit yayı
- 2. Kanat
- 3. Bağlantı unsuru
- 4. Bağlantı noktası
- 5. Ara ağırlık
α. Hücum açısı
A. A yay parçası
B. B yay parçası
C. C yay parçası
D. D yay parçası
T. Kuvvet vektörü
H. Hava akış yönü
SİSTEMİN AÇIKLANMASI
Sikloidal hareket mekanizmaları silindirik formda bir gövde, gövde yan kenarları üzerinde konumlu kanatlardan (2) oluşmaktadır. Kanatlar (2) havanın yönlendirilmesi amacıyla kullanılabilmektedir. Bu sayede hareket mekanizmasının bağlı olduğu kütle ya da hareket mekanizması hareket ettirilebilmektedir.
Hareket mekanizmasını oluşturan her bir kanat (2), bulundurduğu bağlantı noktası
(4) üzerinden, bağlantı unsuru (3) vasıtasıyla bir hareket miline bağlanmıştır. Hareket mili ise genellikle silindirik formda gövdenin merkezine konumludur.
Buluş, hareket mekanizmasının dairesel kesitine (1) ilişkin en az 180 ° lik yay kesitinde bulunan kanatlarının hücum açılarının (α) 0°’ye sabitlenerek hareket mekanizmasının ya da hareket mekanizmasının bağlı olduğu kütlenin istenilen yöne hareket etmesinin sağlanmasına ilişkindir. Hareket mekanizmasının dairesel kesitinin (1) geri kalan kısmında bulunan kanatların (2) hücum açıları (α) bu durumda 0°’den farklı bir değerdedir. Bu sayede ikincil dairesel kesit yayı (1.2) yönünde kuvvet vektörü (T) oluşturularak, hareket mekanizmasının ya da hareket mekanizmasının bağlı olduğu kütlenin bu yönde hareketi sağlanabilmektedir.
İkincil dairesel kesit yayı (1.2), hareket mekanizmasının dairesel kesiti (1) üzerinde, kanatlarının hücum açılarının (α) 0°’den farklı olduğu yay parçasını, birincil dairesel kesit yayı (1.1) ise hareket mekanizmasının dairesel kesiti (1) üzerinde, kanatlarının hücum açılarının (α) 0° olduğu yay parçasını tanımlamaktadır. İkincil dairesel kesit yayı (1.2) ve birincil dairesel kesit yayının (1.1) toplamı ise hareket mekanizmasının dairesel kesitini (1) oluşturmaktadır.
Şekil 1’de tüm kanatların (2), hücum açısı (α) 0˚ olduğu durumda hareket mekanizmasının dairesel kesiti (1) gösterilmiştir. Bu durumda birincil dairesel kesit yayı (1.1) 360 °, ikincil dairesel kesit yayı (1.2) 0 °’dir. Bu durumda sistem güç üretmeyeceğinden, hareketsizdir.
Şekil 4’te birincil dairesel kesit yayın (1.1) 180° olarak belirlenmiş, dolayısıyla ikincil dairesel kesit yayı (1.2) da 180 ° olarak tanımlanmaktadır. Bu koşulda hareket mekanizmasının dairesel kesiti (1), merkezinden ikincil dairesel kesit yayı (1.2) yönüne dik bir kuvvet vektörü (T) sisteme etkiyebilmektedir.
Benzeri şekilde Şekil 5’te birincil dairesel kesit yayın (1.1) 240 °, dolayısıyla ikincil dairesel kesit yayı (1.2) da 120 ° olarak tanımlanmaktadır. Bu koşulda hareket mekanizmasının dairesel kesiti (1), merkezinden ikincil dairesel kesit yayı (1.2) yönüne dik bir kuvvet vektörü sisteme etkiyebilmektedir. Ancak oluşan kuvvet vektörü, kuvveti Şekil 4’te verilen kuvvet vektörüne göre daha küçüktür.
Hareket mekanizması dairesel kesiti (1) üzerinde ikincil dairesel kesit yayının (1.2) konumu ve boyu değiştirilerek, sistem üzerine etkiyen kuvvet vektörünün (T) yönü belirlenebilmektedir. Şekil 6’da farklı ikincil dairesel kesit yayı (1.2) konumları için oluşabilen kuvvet vektörü (T) yönleri gösterilmiştir.
Hareket mekanizması dairesel kesiti (1) üzerinde farklı yay parçası konumlarına, ikincil dairesel kesit yayı (1.2) oluşturularak kuvvet vektörü (T) yönleri düzenlenebilmektedir.
Örneğin ikincil dairesel kesit yayının (1.2), A yay parçası (A) ve B yay parçasından (B) oluşması durumunda, kuvvet vektörü (T) y ekseni yönünde oluşturulmaktadır.
İkincil dairesel kesit yayının (1.2), B yay parçası (B) ve D yay parçasından (D) oluşması durumunda ise, kuvvet vektörü (T) x ekseni yönünde oluşturulmaktadır.
İkincil dairesel kesit yayının (1.2), yalnız C yay parçasından (C) oluşması durumunda ise, kuvvet vektörü (T) -x ve –y tam orta ekseni yönünde oluşturulmaktadır.
İkincil dairesel kesit yayının (1.2) ve birincil dairesel kesit yayının (1.1) oluşturulabilmesi için hidrolik, pnömatik, mekanik ve elektrik kontrollü sistemler kullanılabilmektedir. Bu sistemler birincil dairesel kesit yayı (1.1) dahilinde bulunan tüm kanatların (2) hücum açısını (α) 0°’ye sabitleyebilen yapıda mekanizmalardır. Bu mekanizma tarifnamenin devamında sabitleme mekanizması olarak anılacaktır.
Ayrıca ikincil dairesel kesit yayı (1.2) üzerine, kanatların (2) tamamının ya da bir bölümünün hücum açısını (α) 0°’den farklı bir değere ayarlayan bir mekanizma konumlandırılabilir.
Harici bir mekanizma kullanılmaksızın ikincil dairesel kesit yayının (1.2) oluşturulabilmesi için, hareket mekanizması dairesel kesitinin (1) kanatlarının (2) tamamının hücum açısı (α) 0°’den farklı olan istenilen açı değerine sabitlenebilir. Sabitleme mekanizmasının etkisiyle hareket mekanizması dairesel kesitinin (1) bir bölümünde, kanatların (2) hücum açısı (α) 0°’ye indirilerek birincil dairesel kesit yayı (1.1) bu bölüm üzerinde oluşturulabilir. Hareket mekanizması dairesel kesitinin (1) diğer bölümünde (ikincil dairesel kesit yayı (1.2)) sabitleme mekanizmasının etkisi olmayacağından kanatlar (2) istenilen açı değerinde kalacaktır. Bu durumda sabitleme mekanizması kanatların (2) üzerine baskı yaparak hücum açısı (α) 0°’de tutabilen bir mekanizma olabilmektedir.
Buluş dahilinde, ikincil dairesel kesit yayı(1.2) üzerinde oluşturulması tercih edilen hücum açısı değeri 0°-45° arasındaki açı değerleridir. Bu değerler arasında kullanılacak hücum açısı değerleri sistemin maksimum verim ile çalışmasını sağlayacaktır.
Sistem de oluşturulan kuvvet vektörünün (T) aksi yönünde hava akış yönü (H) oluşmaktadır. Oluşan bu hava akış yönünde (H) ilerleyen hava o bölümde bulunan kanatlar (2) sebebiyle dirençler ile karşılaşabilir ya da bu bölgelerde girdaplar oluşturabilir. Bu durum sistemin stabilitesini ve verimini etkileyebilmektedir.
Bu problemlerin elimine edilmesi için hareket mekanizması dairesel kesitin (1) üzerinde kanat (2) bulunduran noktanın karşısı ağırlık (5) ile donatılmıştır.
Karşı ağırlıklar (5) dairesel döngüde sistem stabilitesini bozmamak/balast oluşturmamak için aynı ağırlıklarda ve kanatların arasına eşit mesafelerde monte edilebilmektedir.
Benzeri şekilde, ara ağırlıklar (5) hava akışına direnç oluşturmayacak geometrilerde tasarlanmaktadır. Örneğin Şekil 8’de gösterilen karşı ağırlıklar silindirik formunda tasarlanmıştır.
Buluşa konu olan hareket mekanizması kanatların (2) her iki uçtan ya da yalnız bir uçtan yataklanmasına uygun şekilde işletilebilmektedir. Kanatların (2) iki ucundan yataklanması durumunda bu yataklama noktalarında elastik bağlantı parçaları kullanılarak kanat etkisiyle oluşacak (flapping,lagging ve huntting) dengeyi bozan etkiler bu elastik bağlantı elemanlarında kısmen sönümlenerek gövdeye stabilite bozucu etkisi azaltılabilmektedir.
İSTEMLER
-
1. Silindirik formda bir gövde, gövde yan kenarları üzerinde konumlu, bulundurduğu bağlantı noktası
(4) üzerinden, bağlantı unsuru (3) vasıtasıyla bir hareket miline bağlanmış kanatlar (2) bulunduran sikloidal hareket sistemi olup özelliği; hareket mekanizmasının ya da hareket mekanizmasının bağlı olduğu kütlenin istenilen kuvvet vektörü (T) yönünde hareket edebilmesi için,
- hareket mekanizması dairesel kesitine (1) ilişkin en az 180 ° lik yay kesitinde bulunan kanatların (2) hücum açılarının (α) 0°’ye sabitlenmesi,
- hareket mekanizması dairesel kesitine (1) geri kalan kısmında bulunan kanatların (2) hücum açılarının (α) 0°’den farklı bir değerde düzenlenmesidir.
- harici bir mekanizma kullanılmaksızın ikincil dairesel kesit yayının (1.2) oluşturulabilmesi için, hareket mekanizması dairesel kesitinin (1) kanatlarının (2) tamamının hücum açısı (α) 0°’den farklı olan istenilen açı değerine sabitlenmesi,
- sabitleme mekanizmasının etkisiyle hareket mekanizması dairesel kesitinin (1) bir bölümünde, kanatların (2) hücum açısı (α) 0°’ye indirilerek birincil dairesel kesit yayı (1.1) bu bölüm üzerinde oluşturulması,
- hareket mekanizması dairesel kesitinin (1) diğer bölümünde (ikincil dairesel kesit yayı (1.2)) sabitleme mekanizmasının etkisi olmayacağından kanatlar (2) istenilen açı değerinde kalması işlem adımları ile karakterize edilmektedir.
2. İstem 1’e göre hareket sistemi olup özelliği; hareket mekanizması dairesel kesiti (1) üzerinde farklı yay parçası konumlarında ikincil dairesel kesit yayı (1.2) oluşturularak kuvvet vektörü (T) yönlerini düzenleyebilmesidir.
3. İstem 1’e göre hareket sistemi olup özelliği; ikincil dairesel kesit yayının (1.2) ve birincil dairesel kesit yayının (1.1) oluşturulabilmesi için pnömatik, hidrolik, mekanik ve elektrik kontrollü sistemler bulundurabilmesidir.
4. İstem 1’e göre hareket sistemi olup özelliği; birincil dairesel kesit yayı (1.1) dahilinde bulunan tüm kanatların (2) hücum açısını (α) 0°’ye sabitleyebilen yapıda sabitleme mekanizması/mekanizmaları bulundurmasıdır.
5. İstem 1’e göre hareket sistemi olup özelliği; ikincil dairesel kesit yayı (1.2) üzerine, kanatların (2) tamamının ya da bir bölümünün hücum açısını (α) 0°’den farklı bir değere ayarlayan mekanizma / mekanizmalar bulundurmasıdır.
6. İstem 1’e göre hareket mekanizması hareket sistemi olup;
7. İstem 1’e göre hareket mekanizması olup özelliği; ikincil dairesel kesit yayı(1.2) üzerindeki kanatların (2) hücum açısının (α) 0°-45° olmasıdır.
8.Silindirik formda bir gövde, gövde yan kenarları üzerinde konumlu, bulundurduğu bağlantı noktası
(4) üzerinden, bağlantı unsuru (3) vasıtasıyla bir hareket miline bağlanmış kanatlar (2) bulunduran sikloidal hareket mekanizması olup özelliği; hareket mekanizması dairesel kesiti (1) üzerinde kanat (2) bulunduran noktanın karşısının ara ağırlık (5) ile donatılmış olmasıdır.
9. İstem 8’e göre hareket mekanizması olup özelliği; dairesel döngüde sistem stabilitesini bozmamak/balast oluşturmamak için aynı ağırlıklarda ve kanatların (2) arasına eşit mesafelerde monte edilmiş ara ağırlık (5) bulundurmasıdır.
ÖZET
HAVA ARAÇLARI İÇİN KULLANILABİLEN KONTROL EDİLEBİLİR HAREKET SİSTEMİ
Buluş, bulundurduğu kanatlar topluca kontrol edilerek hareket rejimi dolayısıyla yönü kontrol edilebilen sikloidal rotor bulunduran hareket mekanizmasına ilişkindir. İlgili hareket mekanizması hava taşıtlarının yönlendirilmesi için kullanılabilir yapıdadır.
Şekil 01
Şekil 02
Şekil 03

Şekil 04
Şekil 05
Şekil 06
Şekil 07
Şekil 08