Ana sayfadaki animasyon gibi kişisel ve hafif bir araç dizayn etmek, vücudun bir parçası gibi rahat hissedip, fonksiyonel bir kullanıma sahip, kuşlar gibi uçabilmemize yardımcı olacak bir sistem tasarım hayalim belki de gerçeğe dönüşüyor.
Önce Drone’lerden bahsedelim. Bilindiği gibi günümüzde Drone ‘ler çok değişik alanlarda kullanılmaktadır. Personel amaçlı ilk Drone ise Çin’li bir firma tarafından geçtiğimiz günlerde tanıtıldı. 200 kg ağırlığında olan bu Drone’nin bir kişiyi 20 dakika boyunca taşıyabileceği açıklandı. EHANG 184 olarak adlandırılan bu Drone bir tablet vasıtasıyla kontrol edilebiliyor ve dört set elektrik motoru bulundurmaktadır.

Tabii ki bu çalışmalar çok hoş olmakla birlikte biliyoruz ki helikopter mantığıyla çalışan bu araçlar kanat çaplarının küçük olması nedeniyle fazla güce ihtiyaç duymakta, elektrik motorunun sargıları ve çalışması için gereken akülerin ağırlıkları sistemin toplam ağırlığını, dolayısıyla taşıma kabiliyetini çok etkilemektedir. Ayrıca küçük ölçeklerde kişisel bir hava aracı olması, bizlere uçuş keyfini yaşatacak alternatif bir taşıt geliştirilmesi, kişisel uçma keyfi yaşama noktasında bizlere olanaklar sunduğu için memnunuz.
Fakat benim amacım daha da küçük, daha hafif, daha kişisel, daha portable, daha bireysel ( bisiklet gibi, scooter gibi, paramotor gibi ) sanki kişinin bir parçasıymış gibi bir konsept oluşturmak. Bunun için ise verimliliği yüksek, yani daha az güç gerektiren ve oldukça hafif bir dizayn gerekli. Helikopterlerin verimliliği – uçakların verimliliği ve cyclogyro sistem verimlilikleri “2009-2010 ÇALIŞMALARI VE GÖZLEMLERİ” ana başlığı altındaki “SUNUM” sayfasında açıklanmış ve cyclogyro / cyclocopter tasarımımın verimlilik anlamında karşılaştırması yapılmıştı, yani cyclogyro / cyclocopter sistem tasarımı helikopterlere göre çok daha verimli idi :
Yine benim umutlarımı iyice artıran bir başka konu da D-dallus firmasının yapmış olduğu cyclogyro / cyclocopter esalı çalışmalardır. D-dallus firmasının yapmış olduğu çalışmalara geçmeden önce ;
2010 yılında yapmış olduğum teorik çalışmalar ve bu çalışmaların prototipte karşılığını bulmuş olması beni çok mutlu etmiş, umutlandırmıştı. Ayrıntıları “prototip çalışma” ve “sistem çalışma prensibi” başlıkları altında anlatılmış olan cyclogyro / cyclocopter ve cycloidal rotor sistemini kısaca ve hemen hatırlamak istersek alttaki şekil:1 ve animasyon :1 bize yardımcı olacaktır;
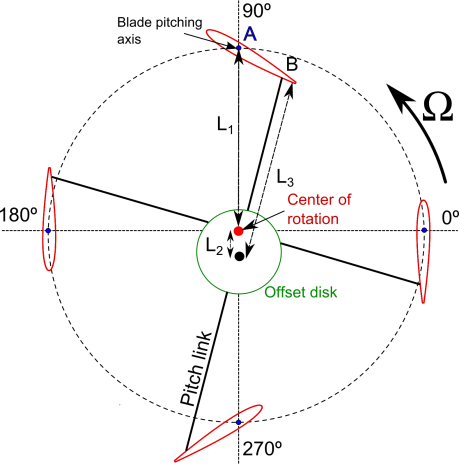
Şekil :1
Animasyon : 1
Yukarıdaki şekil ve animasyondan da anlaşılacağı üzerine cycloidal rotor sistemde kanatlar döngüsel hareketin her bir noktasında farklı hücum açıları almaktadır. Şekillerdeki gibi kanatlar dönme ekseninin bir yarısında pozitif hücum açısı alırken dönme ekseninin diğer bir yarısında ise negatif değer almaktadır.
Evet bu teori üzerine yapmış olduğum güç hesapları ve prototip çalışmalarımda ölçülen değerler birbirleriyle örtüşmüş, umudumun boş olmadığını göstermişti. Aradan geçen yaklaşık altı yıl sonra internet ortamında görmüş olduğum bazı çalışmalar ve bu çalışmaların teori alt yapısının benim çalışmalarımla aynı olması, yapılmakta olan bu çalışmaların belli bir seviyeye gelmiş olması beni daha da çok umutlandırıp inancımı pekiştirdi, cesaretimi artırdı. D-Dallus firmasının yapmış olduğu çalışmaları kısaca bakacak olursak;
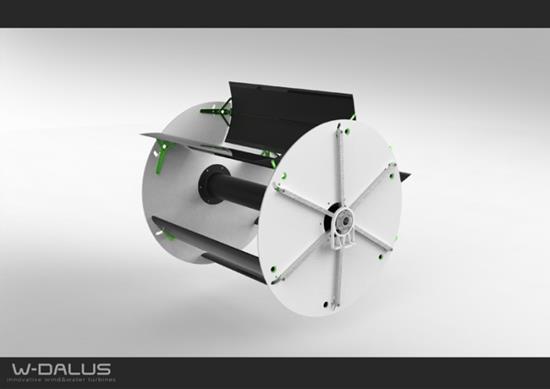


D-Dallus firması yukarıdaki animasyonda görmüş olduğumuz konsept ile 100 kg:’lık bir ağırlığı havalandırmıştır. Videoda görünen bu konsept benimde 2009-2010 yıllarındaki prototip çalışmalarını yapmış olduğum cycloidal rotor prensibi ile çalışmaktadır.
Sonuç olarak D-dallus firmasının yapmış olduğu çalışmalar benim çalışmalarımla örtüşmekte ve benim bulgularımı desteklemektedir. Benim geçmiş tecrübelerim ve gözlemlerim ile D-dallus firmasının çalışmalarından edindiğim izlenim ile yeni yaklaşım tarzımın daha bir uygulanabilir, daha stabil çalışma kabiliyeti olan bir taşıt dizaynına olanak sağlayacağı kuvvetle muhtemeldir.
EVET YENİ YAKLAŞIM TARZIM
2009-2010 prototip çalışmalarımda sistemin verimli olduğu teyit edildi. Fakat cyclogyro / cyclocopter çalışma prensibi gereği kanadın dönme ekseninde devamlı farklı açılar alması sistemin stabilitesini olumsuz yönde çok etkilediği de görüldü. Ayrıca internet ortamındaki görsellerden anlaşıldığı kadarı ile D-dallus firmasının çalışmalarında da kısmen bu gözlenmektedir. Bu noktada stabilite konusunu daha kolay çözebileceğimize inandığım yeni bir yaklaşım tarzı benimsedim. Bu yaklaşım tarzına göre kanatlar döngüsel hareketin sadece yarısında aktif, reel iş yapacak diğer yarısın da ise etkisiz / nötr bir konum alacaktır. Böylece sistemin kısmen verimliliği düşmüş olsa da yine helikopterlere göre oldukça verimli olacak ve bunun yanında da sistemin mekanizması, kontrol sistemi çok daha sade ve hafif olacak, çok daha kolay uçabilir, çok daha kolay kontrol edilebilir olabilecektir;
İşte yeni yaklaşım tarzımın ayrıntısı ,
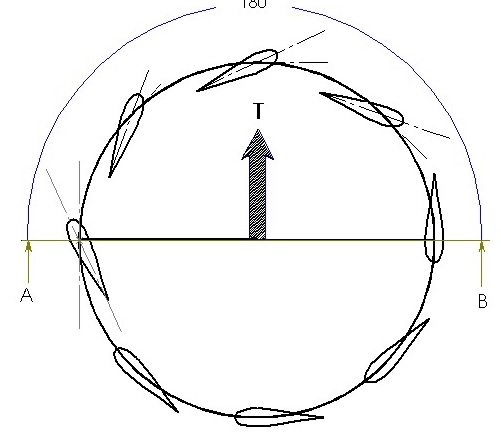
Şekil : 1
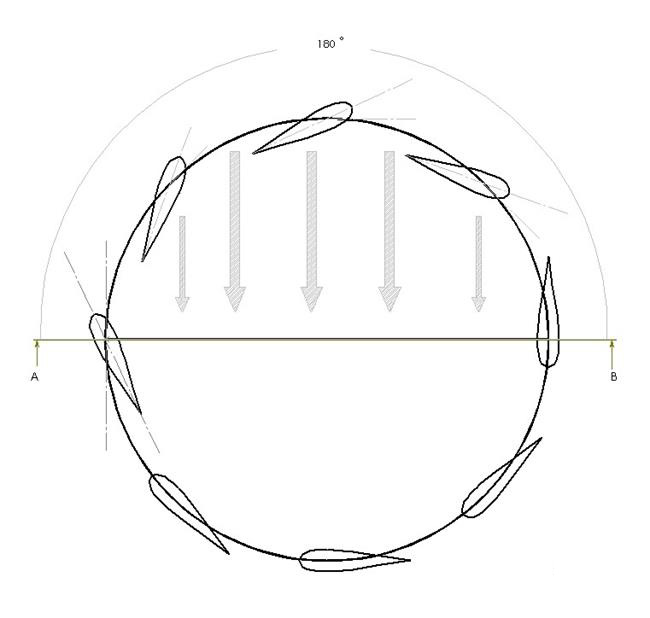
Şekil : 2
Şekil : 1’ de döngüsel harekette AB kesitinin üst yarım dairesi boyunca ( 180 derecelik bir döngüde ) kanatların almış oldukları sıfırdan farklı açı durumları gösterilmiş ve kanatların bu durumu için kaldırma kuvvetinin yönü belirtilmiştir.
Şekil : 2’ de ise yine aynı şekilde AB kesitinin üst yarım dairesi boyunca kanatların açılı bir döngüsel hareketinde hava akımının yönü şematize edilmiştir. Kanatlar reel olarak iş yapmakta ve havayı aşağıya doğru- ok işaretleri yönünde iterken sistemi yukarı doğru kaldırmaya çalışmaktadır.
Yukarıda şekil :1 ve Şekil :2 ile anlatılmaya çalışılan sistemin görsel animasyonu aşağıdaki gibi olacaktır. Kanatlar her döngünün yarım periyodunda efektif iş yapacak şekilde istediğimiz ölçüde açılandırılacaklardır.