Buluşumuz, hava araçlarının hareketini sağlayan bir hava aracı hareket ve yönlendirme motoru ve sistemi ile ilgilidir.
Şekillerin Açıklaması
1. Bir hava aracı hareket ve yönlendirme motorunun yandan ayrıntılı görünümü
2. Kanat simetri yapısının yandan kesit görünümü
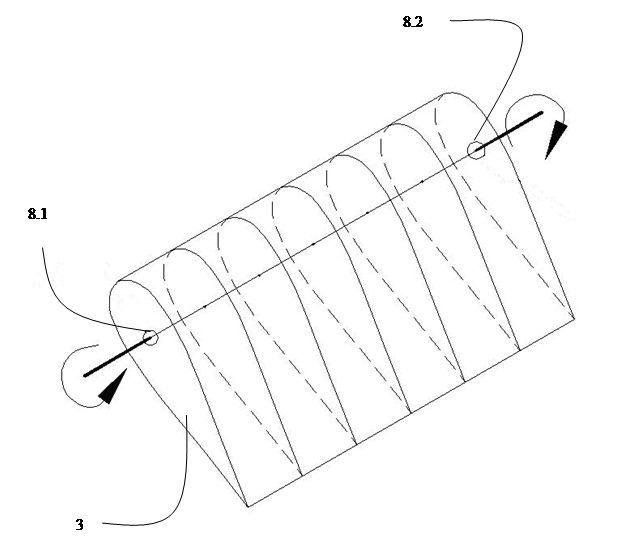
3. Kanat yapısının üstten şeffaf görünümü
4. Kanat yapısının moment merkezi görünür şekilde
5. Kanat yapısının yataklama kolu ve kanat moment merkezi görünür şekilde üstten şeffaf görünümü
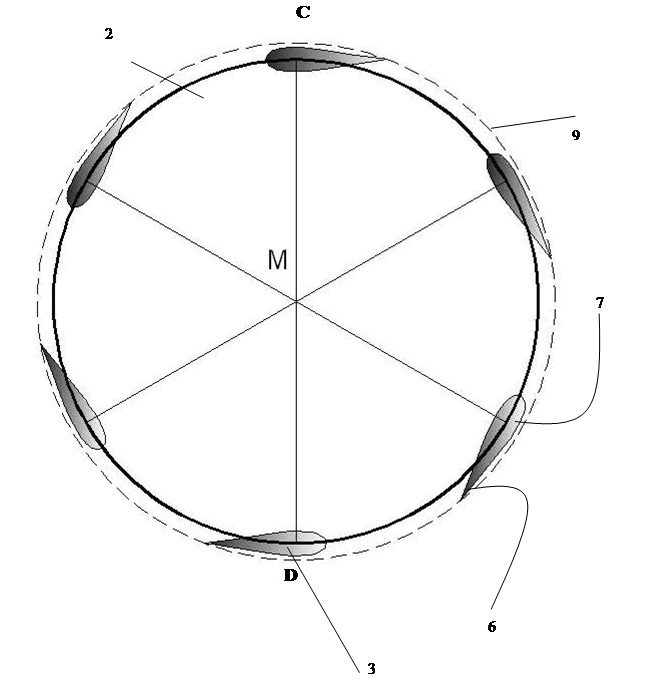
6. Bir hava aracı hareket ve yönlendirme motorunun kanatlarının dönme eksenine göre sıfır derece yapmış halde üstten görünümü
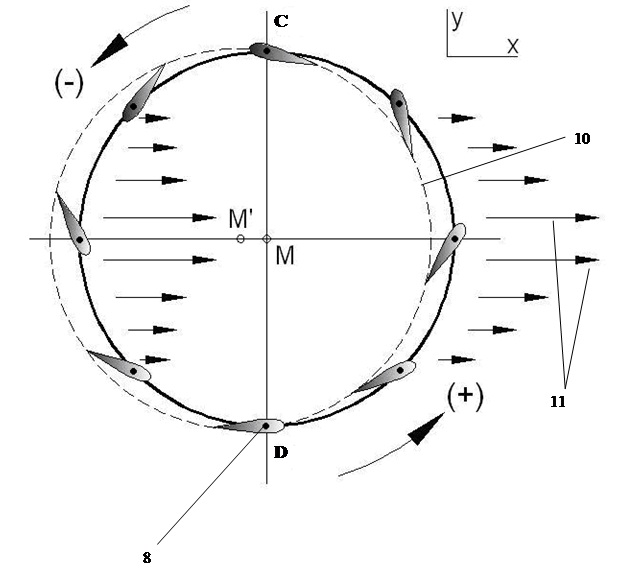
7. Bir hava aracı hareket ve yönlendirme motorunun hareket halinde ve kanat kuyruk dairesi merkez noktasının kaydırılmış farklı bir konumdaki ( M’ konumu ) üstten görünüşü
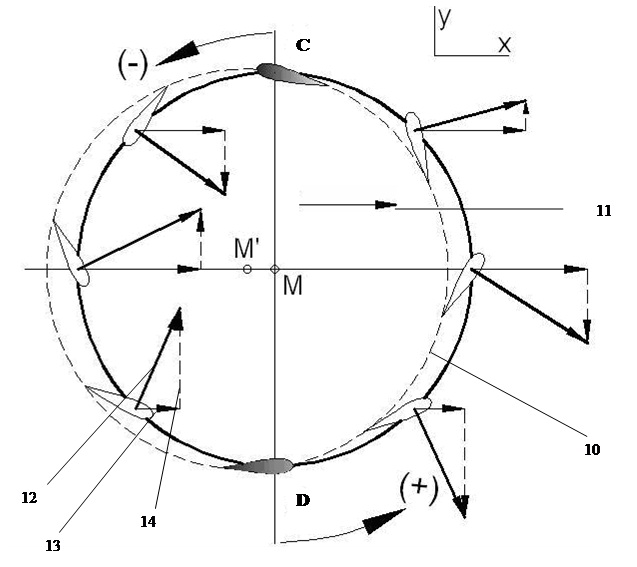
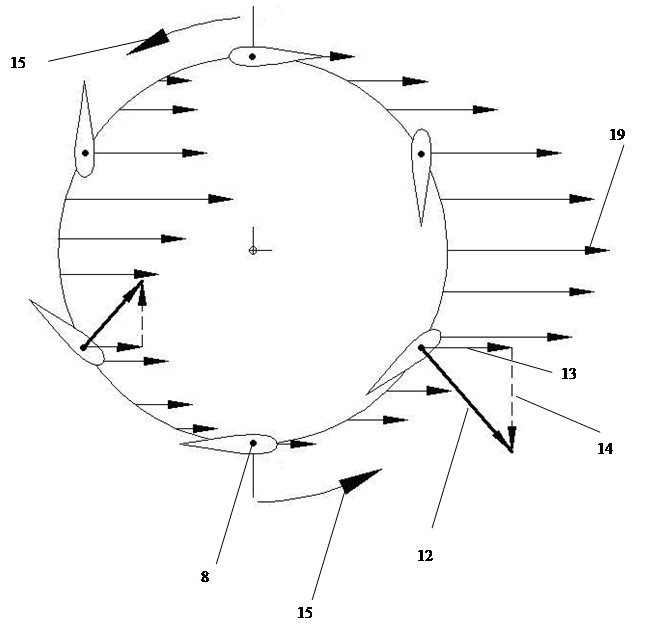
8. Bir hava aracı hareket ve yönlendirme motorunun hareket halinde kinematik kuvvetlerini belirten üstten görünüş
9. Bir hava aracı hareket ve yönlendirme motorunda simetrik olmayan kanat açıları için hareket halindeki kinematik kuvvetleri belirten görünüm
10. Bir hava aracı hareket ve yönlendirme motorunun hareket halinde anlık hız vektörleri ile üstten görünüm
Parçaların Açıklaması
1. Mil
2. Tambur
3. Kanatlar
4. Yataklama noktası
5. Tambur merkezi
6. Kanat Kuyruğu
7. Kanat Başı
8. Kanat moment merkezi
8.1. Kanat ön yüzeyi moment merkezi
8.2. Kanat arka yüzeyi moment merkezi
9. Stabil konum kanat kuyrukları teğet çemberi
10. Kanat kuyruklarının oluşturduğu M’ merkezli teğet çemberi
11. Toplam Kaldırma kuvveti
12. Kaldırma Kuvveti
13. Kaldırma kuvveti x ekseni bileşeni
14. Kaldırma kuvveti y ekseni bileşeni
15. Tambur dönme yönü
16. Kanat üzerindeki bileşke hız
17. Sistemin hızı
18. Kanadın dairesel dönme hızı
19. Sistemin yönü
M. Kanat kuyruk dairesi merkez noktası
M´. Kanat kuyruk dairesi kaydırılmış merkez noktası
Buluşumuz olan bir hava aracı hareket ve yönlendirme motoru dikey iniş ve kalkış yapabilmekte ayrıca havada asılı kalabilmektedir. Bu sayede sabit kanatlı hava taşıtlarında bu taşıtların havalanabilmesi için zorunlu olan uzun ve düzgün pistlerin kullanımına gerek kalmamıştır.
Buluşumuz olan bir hava aracı hareket ve yönlendirme motoru helikopter ve benzeri sistemler gibi karmaşık yapılara sahip olmadığı için hem üretim hem de kullanım maliyetleri çok daha aşağıdadır. Ayrıca basit yapıları sebebiyle helikopter ve benzeri sistemlere göre daha az arıza ihtimali ortaya koymaktadır. Bunlara ek olarak helikopter ve benzeri sistemler manevra kabiliyetleri sınırlı olan sistemlerdir ancak buluşumuz manevra kabiliyeti açısından helikopter ve benzeri sistemlere göre çok daha avantajlıdır.
Buluşumuz olan bir hava aracı hareket ve yönlendirme motorunun kullanımı ile ( uygun kompozit malzemelerden mamul bir hava aracı için )birim araç kütlesi / taşıma kabiliyeti oranı düşmektedir.
Buluşumuz olan bir hava aracı hareket ve yönlendirme motorunun kullanımı ile verimlilik helikopter ve benzeri hava taşıtları ile kıyaslandığında % 100’e yakın artmaktadır.
Buluşumuz olan bir hava aracı hareket ve yönlendirme motorunun kullanımı ile düşük ağırlıklı ve basit yapıda (düşük maliyetli) hava aracı sistemleriyle insan taşıyabilme imkanı yaratılmış olmaktadır. Bu sayede günlük ve bireysel kullanım için kullanılabilecek dikey havalanan bireysel hava aracı üretilme imkanı ortaya çıkmaktadır.
Buluşumuz olan bir hava aracı hareket ve yönlendirme motoru hareketi sağlayan kuvveti 360º düzlemde kontrol edebildiği için sistemin manevra kabiliyeti mevcutta kullanılan hava taşıtlarına oranla çok daha fazla artmaktadır.
Buluşumuz olan bir hava aracı hareket ve yönlendirme motoru kullanılacak güç ünitesi ve ses izolasyonlarına bağlı olarak mevcutta çalışan sistemlerden daha az ses çıkaracak şekilde tasarlanabilmektedir. Bu sayede sessiz çalışması istenilen savaş hava araçlarında kullanıma uygundur.
Buluşumuz olan bir hava aracı hareket ve yönlendirme motorunun kanatları her iki uçtan yataklandığı için helikopter ve benzeri hava araçlarında karşılaşılan stabilite problemleri elimine edilmiştir. Bahsi geçen kanatların yataklanmış olması sayesinde kanat uç girdapları ve bu durumun oluşturduğu verimsizlik ve bu durumun stabilite bozucu etkisi ortadan kaldırılmıştır.
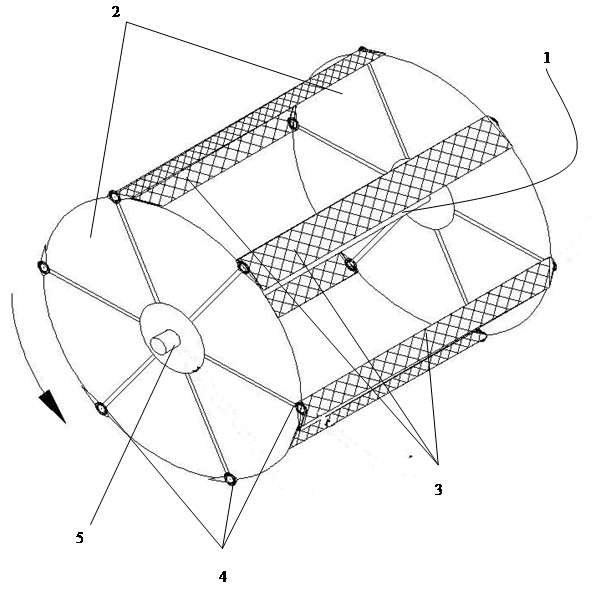
Buluşumuz olan bir hava aracı hareket ve yönlendirme motoru yapısı içerisinde, bir mil (1), bahsi geçen mil (1) üzerinde tercihen milin (1) iki ayrı ucuna, istenilen aralıklarla konumlandırılmış, en az iki dairesel yapıda tambur (2) bulundurmaktadır. Talep edilmesi durumunda sistem içerisinde tambur yerine kanat taşıyıcı kollarda kullanılabilmektedir. Tambur (2) dış kenarları üzerine eşit aralıklarla, tercihen karşılıklı kanatlar (3) konumlandırılmıştır. Her kanat (3) mil (1) üzerinde konumlandırılmış olan tamburlara (2), yataklama noktaları (4) vasıtasıyla bağlanmıştır. Tambur (2) üzerindeki her bir yataklama noktasının (4) dolayısıyla her bir kanadın (3) tambur merkezine (5) olan uzaklığı sabittir.
Mil (1) üzerine konumlandırılmış tamburlar (2) ve tambur (2) üzerine yataklanmış kanatlar (3) ahşap, metal, alaşım, kompozit ve benzerleri gibi çeşitli malzemelerden üretilebilmektedir. Ancak uçuş stabilitesini ve verimliliğini sağlamak amacıyla en hafif ve en dayanıklı malzemelerin seçimine özen gösterilmelidir.
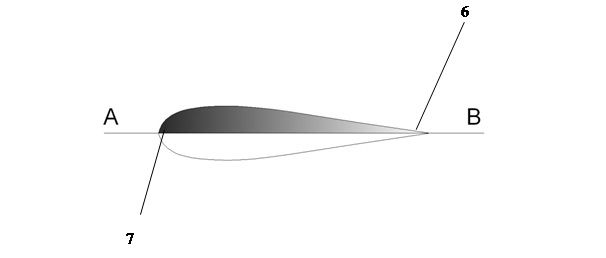
Tercihen kanat (3) yapısı simetrik kesitli olmalıdır. Kanat (3) üst kesiti ile kanat (3) alt kesiti A-B eksenine göre aynıdır. Ancak tercih edilecek kanat (3) formu NACA Airfoil veya diğer değişik simetri formlardan da seçilebilmektedir.
Kanat (3) uzunluğu, genişliği ve kalınlığı kulanım alanlarına göre değişim gösterebilmektedir. Farklı kullanım alanları ve farklı amaçlar için, farklı itme ve çekme kuvvetini oluşturacak şekilde, farklı kanat (3) uzunluğu, genişliği ve kalınlık değerleri kullanılabilmektedir. Aynı şekilde istenilen itme kuvvetini oluşturmak amacıyla sistemde kullanılacak kanat sayısı düzenlenebilmektedir.
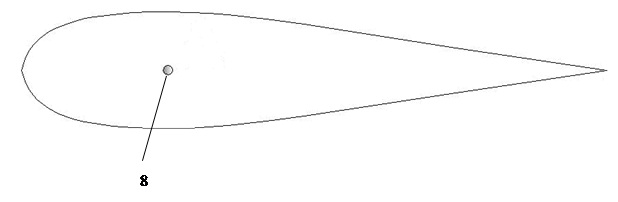
Kanatlar (3) tamburlara (2) yataklanırken, tercihen kanat moment merkezi (8) üzerinden yataklanmaktadır. Kanat moment merkezi (8) tercihen kanadın (3), kanat başı (7) tarafına yakın olan kısmına konumlandırılmıştır. Kanat (3) genişliği c gibi bir değişken olarak düşünüldüğünde tercihen kanat moment merkezinin (8) kanat başına (7) uzaklığı c/4 iken, kanat kuyruğuna (6) olan uzaklığı 3c/4 olmaktadır. Tamburlar (2) üzerinde kanatlar (3) tambura (2) yataklanırken bahsi geçen kanat moment merkezlerinden (8) tercihen karşılıklı olarak yataklanmaktadır.
Yukarıda bahsedilen şekilde tamburlar (2) üzerine kanat moment merkezlerinden (8) yataklanmış olan kanatlar (3) yine bu eksen etrafında istenilen yönlendirme miktar ve yönüne bağlı olarak (+) ve (-) açı yapacak şekilde yönlendirilebilmelidir. Bu sayede kanatlar kanat moment merkezi çevresinde (+) ve (-) açı alabilecek şekilde serbestçe hareket edebilmektedir.
Buluşumuz olan bir hava aracı hareket ve yönlendirme motoru stabil durumdayken bütün kanatlar (3) dönme eksenine göre sıfır derece açı yapmaktadır. Kanat (3) açıları değiştirilmeden, kanatların (3) dönme eksenine sıfır derece açı yaptığı durumda, tambur (2) üzerinde hareket sağlandığında, kanatlar (3) dönme eksenine sıfır derece hücum açısı yaparak hareketlendiği için dairesel hareket eden kanatlar (3) itme ve çekme kuvveti oluşturmazlar.
Belirli bir yarıçap üzerinde yataklanmış kanatlar (3) tambur (2) ile birlikte dönerken, tambur (2) tarafından belirlenen daire kanat moment eksenini belirler ve hep aynı rota üzerindedir değişmez. Sistemin bu hareketi sırasında kanatlar (3) sıfır hücum açısıyla hareket etmektedir, bu durumda kanat kuyruklarından (6) geçtiği farz edilen stabil konum kanat kuyrukları teğet çemberi (9) merkezi, kanat kuyruk dairesi merkez noktası (M) olmaktadır. Bahsi geçen bu hareket sırasında hücum açısı sıfır dolayısıyla itme çekme kuvveti sıfır olduğu için tambur (2) dönmesine rağmen sistem hareket etmemektedir.
Sistemin hareketi sonucunda itme ve çekme kuvvetlerinin ortaya çıkabilmesi için kanat kuyruklarından (6) geçtiği varsayılan, stabil konum kanat kuyrukları teğet çemberinin (9) merkezi olan,kanat kuyruk dairesi merkez noktasının (M), kaydırılması gerekmektedir. Bu sayede sistem üzerine etkiyen toplam vektörel kuvvetler bir itme ve çekme kuvveti sağlamaktadır. Kanat kuyruk dairesi merkez noktası (M) kaydırılırsa ( M’olan yeni konumuna taşınırsa ) kanat kuyruklarının (6) oluşturmuş olduğu dairenin boyutları değişmemekte sadece dairenin konumu yani dolayısıyla dairenin merkezinin bulunduğu nokta değişmektedir.
Örneğin sisteme yapılan herhangi bir etki sonucu, kanat kuyruklarının (6) geçtiği varsayılan kanat kuyruk dairesi merkez noktası (M), kanat kuyruk dairesi kaydırılmış merkez noktası (M’) kaydırılması istenilirse kanat hücum kenarları değişik konumlara göre değişik büyüklüklerde (+) ve (-) değerler alacak şekilde düzenlenebilmektedir. Tambur (2) dolayısıyla kanatlar (3) saat yönünün tersine dönerken CD ekseninin solunda kalan kanatlar (3) değişik büyüklüklerde (-) hücum açılarına, CD ekseninin sağ tarafındaki kanatlar (3) ise yine değişik büyüklüklerde (+) hücum açılarına sahip olmaktadır. Böylece kanatlar (3) bulundukları konum ve bu konuma bağlı olarak almış oldukları hücum açısına ve bu noktadaki anlık bileşke hıza göre vektörel kuvvet oluşturmaya başlarlar.
Her kanat (3) kendi hareketi sonucu sisteme bir kaldırma kuvveti (12) uygulamaktadır. Toplam anlık vektörel kuvvetin ortaya konabilmesi için her kanat (3) tarafından ortaya konulan kaldırma kuvveti x ekseni bileşenleri (13) ve kaldırma kuvveti y ekseni bileşenlerinin (14) toplanması gerekmektedir. Bahsi geçen vektör bileşenlerinin toplanması ile toplam anlık vektörel kuvvet dolayısıyla toplam kaldırma kuvveti (11) bulunabilmektedir. Toplam kaldırma kuvveti (11), kanatlar (3) tarafından anlık kanat (3) konumları için sisteme uygulanan kaldırma kuvvetidir. Konumlandırdığımız kanat kuyrukları (6) dairesi merkezi kanat kuyruk dairesi kaydırılmış merkez noktası (M’) olarak seçilirse toplam kaldırma kuvvetinin (11) yönü x ekseninde (+) yönde oluşmaktadır. Oluşturulan toplam kaldırma kuvvetinin (11) büyüklüğü kanat (3) yapısı, kanat (3) sayısı, dönme hızı ve kanat kuyruk dairesi kaydırılmış merkez noktası (M’) - kanat kuyruk dairesi merkez noktası (M) arasındaki mesafe gibi değişkenler tarafından kontrol edilebilmekte ve bu değişkenler kullanıcı tarafından düzenlenebilmektedir.
Yukarıda da vektörel analizde bahsedilmiş olduğu gibi kanat kuyruk dairesi merkez noktası (M) x ekseninde (-) yönde kanat kuyruk dairesi kaydırılmış merkez noktası (M’) gibi bir konuma kaydırılması halinde sistem üzerine etki eden toplam kaldırma kuvveti (11) sistemi tam tersi yönde yani x ekseni düzleminde (+) yönde etkilemektedir. Yine aynı kanat kuyruk dairesi kaydırılmış merkez noktası (M’) noktasından farklı bir nokta olan y ekseni üzerinde (+) yönde kaydırılırsa toplam kaldırma kuvveti (11) sisteme y ekseninde (-) yönde etkiyecektir. Bu temel mantık kullanılarak kanat kuyruk dairesi merkez noktası (M) yeri değiştirilerek sisteme etkiyen toplam kaldırma kuvvetinin (11) yönü ve büyüklüğü düzenlenebilmektedir.
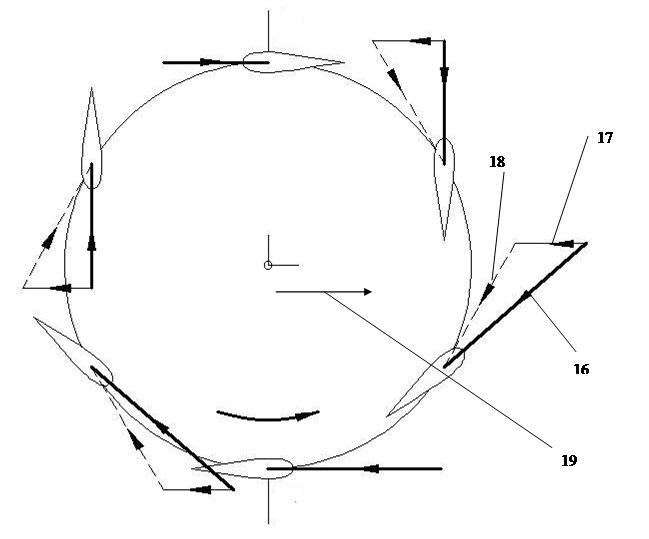
Sistem içerisinde her kanat (3) tarafından anlık üretilen kaldırma kuvvetinin (12) büyüklüğü bahsi geçen kanadın (3) o konumda ve o andaki hızıyla orantılıdır. Hareket eden bir sistemde tamburla (2) beraber dönen kanadın (3) anlık hızı kanadın üzerindeki bileşke hız (16) ile ifade edilmektedir. Bahsi geçen bu hız vektörü sistemin hızı (17) ve kanadın dairesel dönme hızı (18) gibi iki hız vektöründen oluşmaktadır. Sistemin hızı (17) tamburun (2) dönme hızı yani kanadın dairesel dönme hızı (18), tamburun dönme yönü (15) ile sistemin hareket yönü ve sitemin hızı (17) gibi değişkenlerin etkisi altındadır.
Yukarıda anlatılan bir hava aracı hareket ve yönlendirme sistemi dahilinde, sisteme etkiyen kuvvetin yönü ve boyutları, dolayısıyla sitemin hareket yönü ve bu yöndeki hızı kanat kuyruk dairesi merkez noktası (M) 360 derecelik düzlemde çeşitli konumlara getirilmesiyle düzenlenebilmektedir. Bu durumda kanat kuyruklarından (6) geçtiği varsayılan dairenin merkez noktası değişmekte ve sonuç olarak kanatlar (3) üzerine etkiyen kuvvetlerin bileşkesi de değişmektedir.
Kanat kuyruklarının (6) oluşturduğu varsayılan kanat kuyruk dairesi merkez noktası (M) merkezli çemberin merkez noktasının konumunun değiştirilebilmesi için tambur (2) üzerindeki kanatların (3) yönlenmeleri ve açıları bir tür toplu yönlendirme aparatı ile düzenlenebilmekte ve bu sayede istenilen yönde ve büyüklükte bir kuvvet dolayısıyla istenilen yönde ve hızda bir hareket oluşturulabilmektedir.
Yukarıda bahsedilen yönlendirme ve hareket sisteminin kurgulanabilmesi için tambur (2) üzerine kanatların (3) simetrik konumlandırılması gerekmektedir. Bu simetrik kanat konumları ve pozisyonları kanatların anlık pozisyonlarında oluşan vektörel büyüklüklerin simetriye yakın olmasını sağlamaktadır. Bu sayede sistemin hareket mekanizması daha basit ve kontrolü kolay olmaktadır. Ancak kanat (3) konumları ve pozisyonları simetrik olmayan sitemlerde aynı mantıkla kullanılabilmektedir. Bu durumda toplam kaldırma kuvveti (11) büyüklüğü ve yönü konusunda analizler yapılırken daha dikkatli hesaplar yapılmalıdır.
Tercih edilmesi halinde sistem bir mil (1) üzerinde konumlandırılmış tek tambur (2) ya da birden fazla tambur (2) ile de çalıştırılabilmektedir. Yine birden fazla tambur (2) bulunduran sistemlerde olduğu gibi tek tambur (2) bulunduran sistemlerde de kanatlar tercihen (3) tambur (2) üzerine karşılıklı ve eşit aralıklarla yataklama noktalarından (4) yataklanmıştır.
Buluşumuz olan bir hava aracı hareket ve yönlendirme motorunun hareketi sisteme bağlanan bir tahrik ünitesi ile sağlanmaktadır. Bahsi geçen tahrik ünitesi sistemin dönüş hızını değiştirerek ortaya çıkartılan hareket miktarını düzenlemektedir.
İSTEMLER
1. Buluşumuz hava taşıtlarında kullanılabilen bir hava hareket ve yönlendirme motoru olup özelliği, bir mil (1), bahsi geçen mil (1) üzerinde tercihen milin (1) iki ayrı ucuna, istenilen aralıklarla konumlandırılmış, tercihen iki dairesel yapıda tambur (2), tambur (2) dış kenarları üzerine belirli aralıklarla, tercihen karşılıklı konumlandırılmış kanatlar (3) bulundurmasıdır.
2. İstem birde bahsedilen tambur (2) olup özelliği, tambur yerine kanat taşıyıcı kollarının da kullanılabilmesidir.
3. İstem birde bahsedilen kanat (3) olup özelliği, her kanadın (3), mil üzerinde konumlandırılmış olan tamburlara (2), yataklama noktaları (4) vasıtasıyla bağlanmış olmasıdır.
4. Yukarıdaki istemlerde bahsedilen yataklama noktası (4) olup özelliği, yataklama noktasının (4) dolayısıyla her bir kanadın (3) tambur merkezine (5) olan uzaklığının aynı olmasıdır.
5. Buluşumuz istem birde bahsedilen kanatlar (3) olup özelliği, kanat (3) alt kesiti ve kanat(3) üst kesitinin A-B eksenine göre simetrik olmasıdır.
6. Buluşumuz istem birde bahsedilen kanatlar (3) olup özelliği, farklı alanlar ve farklı amaçlar için farklı kanat sayısı, kanat genişliği, kanat uzunluğu ve kanat kalınlığının kullanılabilmesidir.
7. Buluşumuz istem birde bahsedilen kanatlar (3) olup özelliği, tamburlara (2) yataklanırken tercihen kanat moment merkezi (8) üzerinden, kanat moment merkezi (8), tercihen kanat başı (7) tarafına yakın olan kısmına konumlandırılarak yataklanmasıdır.
8. Buluşumuz yukarıdaki istemlerde bahsedilen kanat moment merkezi (8) olup özelliği, buluşumuzun bir uygulamasında kanat (3) genişliği c gibi bir değişken olarak düşünüldüğünde kanat moment merkezinin (8) kanat başına (7) uzaklığı c/4 iken, kanat moment merkezinin (8) kanat kuyruğuna (6) olan uzaklığı 3c/4 olmasıdır.
9. Buluşumuz istem birde bahsedilen kanatlar olup özelliği, kanatların (3) tamburlara (2) yataklanırken kanat moment merkezlerinden (8) tercihen karşılıklı olarak yataklanmasıdır.
10. Buluşumuz istem birde bahsedilen kanatlar (3) olup özelliği, tamburlar (2) üzerinde kanat moment merkezlerinden (8) yataklanmış olan kanatların (3), kanat moment merkezi (8) ekseni etrafında istenilen yönlendirme miktar ve yönüne bağlı olarak (+) ve (-) açı yapacak şekilde yönlendirilebilmesidir.
11. Buluşumuz hava taşıtlarında kullanılabilen bir hava hareket ve yönlendirme motoru olup özelliği, mil üzerinde konumlandırılan tambur (2) ve kanatların (3) ahşap, metal, alaşım, kompozit ve benzeri malzemelerden üretilmiş olmasıdır.
12. Buluşumuz yukarıdaki istemlerle uyumlu bir hava motoru olup çalışma prensibi aşağıdaki şekilde karakterize edilmektedir,
• Buluşumuz olan bir hava aracı hareket ve yönlendirme motorunun stabil durumdayken bütün kanatlarının (3) dönme eksenine göre sıfır derece açı yapması,
• Kanat açıları değiştirilmeden, kanatların (3) dönme eksenine sıfır derece açı yaptığı durumda, tambur (2) üzerinde hareket sağlandığında, kanatların (3) dönme eksenine sıfır derece hücum açısı yaparak hareketlenmesi dolayısıyla dairesel hareket eden kanatların (3) itme ve çekme kuvveti oluşturmaması,
• Belirli bir yarıçap üzerine yataklanmış olan kanatların (3) tambur (2) ile birlikte dönerken, tambur tarafından kanat moment daire ekseninin belirlenmesi ve hep aynı rota üzerinde harekete devam etmesi dolayısıyla kanat kuyruklarından (6) geçtiği varsayılan stabil konum kanat kuyrukları teğet çemberinin (9) merkezinin, kanat kuyruk dairesi merkez noktası (M) olması,
• Kanat kuyruklarından (6) geçtiği varsayılan stabil konum kanat kuyrukları teğet çemberinin (9) merkez noktası kanat kuyruk dairesi merkez noktasının (M) kaydırılması, dolayısıyla sistem üzerine etkiyen toplam vektörel kuvvetlerin bir itme ve çekme oluşturması,
• Kanat açıları başlangıçta yönlendirilerek, kanatların (3) dönme eksenine göre (-) ve (+) değişik konumları aldığı ilk durağan durumdan sonra tambur (2) üzerinde hareket sağlandığında kanatlar (3) dönme eksenine göre değişik açısal değerler alarak hareket edeceklerdir. Böyle bir durumda etkili bir itme-çekme kuvveti oluşması için tamburun (2) devir sayısı tahrik motoru vasıtasıyla kontrol edilir olmasıdır
• Kanat kuyruk dairesi merkez noktası (M), kanat kuyruk dairesi kaydırılmış merkez noktasına (M’) kaydırıldığında kanat hücum kenarları değişik konumlara göre değişik büyüklüklerde (+) ve (-) değerler alacak şekilde düzenlenmesi dolayısıyla, kanatlar (3) saat yönünün tersine dönerken CD ekseninin solunda kalan kanatların değişik büyüklüklerde (-) hücum açıları alması, CD ekseninin sağ tarafındaki kanatların (3) ise yine aynı büyüklüklerde (+) hücum açılarına sahip olması, dolayısıyla kanatların (3) bulundukları konum ve bu konuma bağlı olarak almış oldukları hücum açısına ve bu noktadaki anlık bileşke hıza göre vektörel kuvvetler oluşturması,
• Kanat kuyruk dairesi merkez noktası (M), kanat kuyruk dairesi kaydırılmış merkez noktasına (M’) kaydırıldığında her kanat için bahsi geçen hız vektörlerinin dolayısıyla kaldırma kuvveti vektörlerinin oluşması,
• Kanat kuyruk dairesi merkez noktası (M), kanat kuyruk dairesi kaydırılmış merkez noktasına (M’) x ekseninde (-) yönde kaydırıldığında, toplam kaldırma kuvveti (11) vektörünün x ekseninde (+) yönde olması ve bahsi geçen toplam kaldırma kuvvetinin (11) büyüklüğünün kanat (3) yapısı, kanat (3) sayısı, dönme hızı ve kanat kuyruk dairesi merkez noktası (M) - kanat kuyruk dairesi kaydırılmış merkez noktasına (M’) arasındaki mesafe gibi değişkenler tarafından kontrol edilmesi ve kullanıcı tarafından düzenlenebilmesi,
• Benzeri şekilde Kanat kuyruk dairesi merkez
noktası (M), kanat kuyruk dairesi kaydırılmış merkez noktasına (M’) x ekseninde (+) yönde kaydırıldığında, toplam kaldırma kuvveti (11) vektörünün x ekseninde (-) yönde olması dolayısıyla kanat kuyruk dairesi merkez noktasının (M) 360 derecelik düzlemde çeşitli konumlara getirilmesi ile kaldırma kuvvetinin (11) yönünün ve büyüklüğünün düzenlenmesi
• Kaldırma kuvveti (11) yönünün ve büyüklüğünün düzenlenmesi ile sistemin hareket yönünün ve hızının düzenlenmesi.
13. Buluşumuz yukarıda bahsedilen çalışma prensibi ile çalışan bir hava hareket ve yönlendirme motoru olup özelliği, kanat (3) kuyruklarının oluşturduğu varsayılan stabil konum kanat kuyrukları teğet çemberinin (9) kanat kuyruk dairesi merkez noktasının (M), kanat kuyruk dairesi kaydırılmış merkez noktası (M’) konumuna değiştirebilmek ve tambur (2) üzerindeki kanatların (3) yönlenmeleri, açılarının istenilen yönde ve büyüklükte olmasını düzenleyen bir tür toplu yönlendirme aparatı bulundurmasıdır.
14. Buluşumuz yukarıdaki istemlerde bahsedilen bir hava hareket ve yönlendirme motoru olup özelliği, simetrik olmayan konumlarda bulunan kanat (3) düzenlemesiyle kullanılabilmesidir.
15. Buluşumuz bir hava hareket ve yönlendirme motoru olup özelliği, bir mil üzerinde bir ya da birden fazla tambur (2) bulundurmasıdır.
16. Buluşumuz bir hava hareket ve yönlendirme motoru olup özelliği, sisteme bağlanacak bir tahrik ünitesi ile milin (1) dolayısıyla da tambur ya da tamburların (2) hareketinin sağlanabilmesidir
Şekil 01
Şekil 02
Şekil 03

Şekil 04
Şekil 05
Şekil 06
Şekil 07
Şekil 08
Şekil 09
Şekil 10